PlatformPilot GTK GUI¶
Installation¶
Ubuntu¶
Obtain the correct
neobotix-pilot-gtkgui-debian package for your architechture and Ubuntu version. For example, the file name for the x86_64 Ubuntu 20.04 package ends with-x86_64-ubuntu-20.04.deb.Install the package as follows:
sudo dpkg -i neobotix-pilot-gtkgui-*.deb
Install missing dependencies via:
sudo apt -f install
The contents of the package should now be installed under
/opt/neobotix/pilot-gtkgui/.To change the default workspace folder (which is ~/pilot/) set the following environment variable in your
~/.bashrc:export PILOT_HOME=/your/custom/path source ~/.bashrc
To run the GTK GUI execute the following:
/opt/neobotix/pilot-gtkgui/bin/pilot_gtkgui.sh
Alternatively you can install a desktop launcher as follows:
xdg-desktop-icon install /opt/neobotix/pilot-gtkgui/share/applications/Neobotix-PlatformPilot-GUI.desktop
You may need to right click on the icon first and select “Allow Launching” to activate it.
See pilot-core documentation for more information regarding standalone simulation mode.
Windows¶
- Execute the
neobotix-pilot-gtkgui-?-windows10.exeinstaller. - The package will be installed to your Profile Folder in
C:\Users\?\PlatformPilotGUI\. - Execute
PlatformPilotGUI\bin\pilot_gtkgui.bator double click on the Desktop Icon.
Connecting¶

Will open a connect dialog:
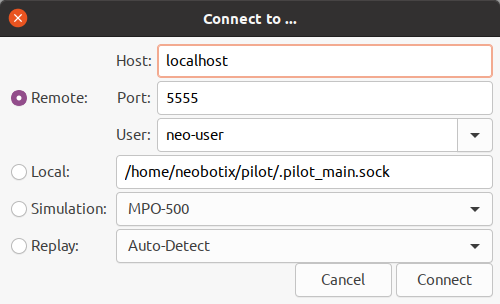
When connecting remotely the IP address or hostname and TCP port (default 5555) need to be specified.
Optionally a login can be performed with the specified user, which is needed for most management functionality.
When connecting locally via UNIX socket only the socket file is needed (Linux only).
To run a simulation select Simulation and the platform type.
To replay a data recording select Replay.
Load Maps¶

Will open a file dialog to choose a *.dat map file.
Note
Loading a map does not automatically upload it to the platform (or simulation). See Upload Maps.
Save Maps¶


Will save the current Grid Map or Road Map to a file.
Alternatively the File menu can be used which offers more options for saving.
Download Maps¶



Depending on the current edit mode, either all maps are downloaded (View Only mode), only the Grid Map is downloaded (Edit Grid Map mode) or only the Road Map is downloaded (Edit Road Map mode).
Upon connecting to a PlatformPilot instance both Grid Map and Road Map are downloaded automatically.
If local changes were overridden by accident it is always possible to revert back.
Alternatively the File menu can be used which offers more options for downloading.




Grid Mapping¶
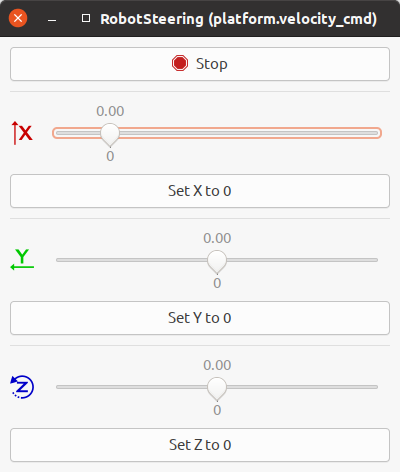
To create a new Grid Map switch to the mapping mode:

Now you can move the platform around using the hardware joystick or by using the remote control.
The new Grid Map will be created and updated while driving around. When the mapping process is finished you can save the new map and / or upload it to the platform, see Connecting.
Note
Requires permissions of neo-installer or neo-admin when connecting remotely.

Map Update¶
To update the current Grid Map switch to the map update mode:

The platform needs to be localized before entering this mode.
Note
Requires permissions of neo-installer or neo-admin when connecting remotely.
Map Editing¶
Usually a new map needs to be edited, to do that switch to the Grid Map edit mode:

Most edit tools below can be scaled via the vector zoom buttons on the left toolbar:



Alternatively Ctrl + Scroll Up/Down can be used.
Erase Tool¶
Obstacles which are not static should be erased with the erase tool:

Holding the left mouse button will erase the area, ie. make it free. Holding the right mouse button will mark the area as unknown.
Make Dynamic Tool¶

Holding the left mouse button will mark the area as dynamic. Holding the right mouse button will erase only dynamic areas.
Dynamic areas are ignored when updating the map.
Make Prohibited Tool¶

Holding the left mouse button will mark the area as prohibited. Holding the right mouse button will erase only prohibited areas.
Prohibited areas are not entered by a platform. They are also ignored when updating the map.
Draw Line Tool¶

Allows to draw artificial walls. Left Click will start and finish a line.
Hold Shift to draw lines continously. Hit ESC to abort a line.


RoadMap Creation¶
To create or edit the Road Map switch to the edit mode:

Select Tool¶

Left Click will select an element. Hold Ctrl to select multiple elements.
To select a whole stretch of road (shortest path), select a starting node then hold Shift and select an end node.
Hold Ctrl + Shift to append another stretch of road.
Move Tool¶

Left Click will select and move an element. Right Click will select an element.
Hold Left Mouse Button to move currently selected elements.
Node Tool¶

Left Click will add a new node. Right Click will select a node.
Hold Shift to connect new node with previous selection.
Hold Shift and Right Click a node to connect with current selection.
Station Tool¶

Left Click will add a new station. Hold Left Mouse Button to assign orientation when adding a station.
Right Click will select a node. Hold Shift to connect new station with previous selection.
Hold Shift and Right Click a node to connect with current selection.

Navigation¶
To switch into navigation mode:

Navigation mode allows for autonomous operation.
If needed initialize the localization first via the Pose Estimate Tool, see below.



Pose Estimate Tool¶

Left Click and hold to define a pose estimate (initialize localization).
Rigth Click and hold to shift the pose estimate in XY direction (initialize localization).
Set Pose Tool¶
In simulation mode it is possible to “teleport” the platform via:

Left Click and hold to define a pose.
Replay¶
To replay a data recording open the connect dialog and select Replay via:
A VNX Player window will open:

It can be operated like a regular audio player.
PlatformPilot¶
User Manual¶
Installation¶
Ubuntu¶
Obtain the correct
neobotix-pilot-core-debian package for your architechture and Ubuntu version. For example, the file name for the x86_64 Ubuntu 20.04 package ends with-x86_64-ubuntu-20.04.deb.Install the package as follows:
sudo dpkg -i neobotix-pilot-core-*.deb
Install missing dependencies via:
sudo apt -f install
The contents of the package should now be installed under
/opt/neobotix/pilot-core/.If you received a license security dongle and you already attached it, unplug it and attach it again in order for the installed udev rule to take effect.
To change the default workspace folder (which is ~/pilot/) set the following environment variable in your
~/.bashrc:export PILOT_HOME=/your/custom/path source ~/.bashrc
To setup the workspace execute the following script:
sh /opt/neobotix/pilot-core/scripts/pilot_setup.sh /opt/neobotix/pilot-core
This will setup a folder
~/pilot/with default settings.To enable autostart:
cp /opt/neobotix/pilot-core/share/applications/Neobotix-PlatformPilot.desktop ~/.config/autostart/
In addition you can install a desktop launcher as follows:
xdg-desktop-icon install /opt/neobotix/pilot-core/share/applications/Neobotix-PlatformPilot.desktop
You may need to right click on the icon first and select “Allow Launching” to activate it.
Change the default configuration to match your platform type:
echo /opt/neobotix/pilot-core/config/default/mpo-700/ > config/local/parentwhere you replace
mpo-700with your platform type.If you received a license security dongle, edit your
config/local/LicenseCheck.jsonfile to contain your license key which you should find printed on the dongle.Set a name and serial for your platform in
config/local/platform.json.Optionally set additional custom configuration options in
config/local, see Configuration.Optionally setup users and passwords, see User Management.
See Running on how to run PlatformPilot.
Windows¶
Execute the
neobotix-pilot-core-?-windows10.exeinstaller.The package will be installed to your Profile Folder in
C:\Users\?\PlatformPilot\.Change into the folder
PlatformPilot\bin\config\local. Edit the fileparentwith a line like this:../../../config/default/mpo-700/
where you substitute
mpo-700with your platform type.If you received a license security dongle, edit your
bin\config\local\LicenseCheck.jsonfile to contain your license key which you should find printed on the dongle.Set a name and serial for your platform in
bin\config\local\platform.json.Optionally set additional custom configuration options in
bin\config\local, see Configuration.Optionally setup users and passwords, see User Management.
See Running on how to run PlatformPilot.
Running¶
Note
If you received a license security dongle, make sure to have it attached.
You can always execute the supplied binaries directly, but for convenience we provide little helper scripts that take care of some required command line options.
Pilot¶
In Windows execute the bin/run_pilot.bat file either in a terminal or by
double clicking on it.
In Ubuntu:
cd ~/pilot
./run_pilot.sh
Additional options can be provided to the scripts as such:
./run_pilot.sh --LocalPlanner.vel_limits.max_trans_vel 0.5
run_pilot.bat --LocalPlanner.vel_limits.max_trans_vel 0.5
Permanent options can be set by writing config files in config/local, see Configuration.
For example a file config/local/LocalPlanner.json:
{
"vel_limits": {
"max_trans_vel": 0.5
}
}
will set the default maximum velocity of the platform to 0.5 m/s.
Simulation¶
The simulation binary will simulate the kinematics as well as sensor data
without accessing any hardware.
Otherwise there is no difference to run_pilot.sh.
In Windows execute the bin/run_pilot_simulation.bat file either in a terminal
or by double clicking on it.
In Ubuntu:
cd ~/pilot
./run_pilot_simulation.sh
Replay¶
To run PlatformPilot in replay mode use the provided script:
cd ~/pilot
./run_pilot_replay.sh
It will try to connect to a running VNX player on /tmp/vnxplayer.sock.
Replay mode is used to view what happened during a recorded drive.
Similar to simulation mode there is no hardware access.
Data Recording¶
To make a data recording use the provided script:
cd ~/pilot
./record_data.sh.sh
The resulting file will be in user/data/.
Parameters¶
It is possible to override the default configuration by either writing local config files in config/local/
or by specifying parameters on the command line.
The following configuration options can be set for most executables above:
self_test- If to perform a self test at the beginning. Will exit if it fails. (default = true)
auto_shutdown- If to automatically shutdown the host machine in case platform is being turned off via the key switch. (default = true)
with_hardware- If hardware modules should be started, ie. hardware is present on this machine and not on a remote. (default = true)
enable_joystickmng- If to enable joystick input. (default = true)
enable_http_server- If to enable HTTP server on port 8888. Needed for HTTP API, WebGUI, etc. (default = true)
enable_taskhandler- If to enable the TaskHandler module. (default = true)
enable_movechainhandler- If to enable the MovechainHandler module. (default = true)
enable_opcua_server- If to enable the vnx.opc_ua.Server module. (default = false)
opcua_proxy_map- A map of vnx.opc_ua.Proxy modules to start, [module name => server address].
vnx_proxy_map- A map of vnx.Proxy modules to start, [module name => server address].
vnx_server_map- A map of vnx.Server modules to start, [module name => server endpoint].
vnx_jrpc_server_map- A map of vnx.JRPC_Server modules to start, [module name => server endpoint].
footprint- Footprint of the platform as a JSON object, see pilot.Footprint.
platform- Static platform information as a JSON object, see pilot.PlatformInfo.
By default the following servers are started:
vnx.Serveron.pilot_main.sock- Supports connections from the local machine via UNIX domain sockets, using the native VNX binary protocol. Almost all permissions are granted to clients connecting to this server, ie. no logins required. A vnx.Proxy is needed to connect. On Linux systems only.
vnx.Serveron0.0.0.0:5555- Supports connections from anywhere via TCP/IP sockets, using the native VNX binary protocol. Login is required to gain anything more than read-only permissions, see User Management. A vnx.Proxy is needed to connect.
In general, most applications accept the following command line arguments:
- The
-hswitch displays a small help message and exits. - The
-dswitch increases the debug level of the terminal output - The
-cswitch accepts a directory with configuration files. You can specify several directories by repeating the switch or by providing multiple directories at once. The order of directories matters, they are read from left to right, potentially overriding previous values. - Finally, you can set specific config values directly on the command line. See Configuration for details.
Terminal Interface¶
While running one of the pilot binaries you can, at any time,
hit the <Enter> key which interrupts the log output
and gives you a terminal prompt. You can now execute one of several
commands.
Type it in and press <Enter> to execute.
Commands that have an output keep the log paused after execution, to give you
time to look at it. The log continues when you press <Enter> again.
The following commands are currently available:
quitexits the applicationdebug [level]changes the level of the output. The bigger the number, the more log messages you get.errorsoutputs the last error messagestopic [expr]searches all topic names forexpr. If there is no exact match, all topics thatexpris a prefix of are shown. If there are none, all matches are shown.module [expr]lists all modules thatexprmatches on. If there is an exact match, it displays more detailed information for that module.grep <expr>restricts terminal output to messages that containexpr.journal [expr]does the same asgrepbut first shows all past log messages that containexpr.spy [expr]does the same asdumpbut without the actual message content.dump [expr]outputs the messages on all topics that matchexpr.htop [field]shows the modules with the highest CPU load in a table that refreshes regularly.fieldcan beavgto change the sorting.exec <module>[.method [args...]]andcall <module>[.method [args...]]invoke the given method of the given module with the given arguments.execwaits for the command to finish and displays the result whilecallperforms an asynchronous call. If no method is given, a list of method signatures for the module is shown.
While typing,
the terminal will provide you with suggestions for the command and
possible arguments. Press the <Tab> key to complete, press it twice to get
a list of suggestions. You can also use the up and down arrows the scroll through
the history of past commands.
Configuration¶
When you start a command line tool, you can supply it with one or more configuration destinations. The configuration is written in JSON.
Reading¶
Hierarchy¶
The configuration follows a hierarchy that is separated by dots (.)
in the names of the keys. The hierarchy is inferred from the file system
and the structure of the JSON in the files.
For example, assume you supply the config destination config/local/ and there
is a file config/local/some/path/Test.json and it contains the following
content:
{
"some_key": {
"other_key": {
"the_answer": 42,
"the_question": ["life", "universe", "everything"]
}
}
}
In this case, the config key some.path.Test.some_key.other_key.the_answer
will be read and set to 42 and the key some.path.Test.some_key.other_key.the_question
will contain a list of strings as shown.
A config destination can contain the special file called parent.
It should consist of a single line giving a path (absolute or relative to the
current destination) to include. This means the contents of the given destination
will be treated as if they were present in the current destination.
Additionally, the parent destination will be read first which is important
for cascading (see below).
Cascading¶
The structure of the configuration makes it possible (and actually good and
common practice) to split a config object across multiple locations.
For example your config destination may have a file Test.json that contains
{ "field_1": 42 }
but also reference a parent directory that also has a file Test.json
that contains
{ "field_2": 23 }
In effect, both Test.field_1 and Test.field_2 are correctly read.
By default, we use this technique to separate
- configuration specific to an installation (in
config/local/in the pilot home folder), which includes - configuration specific to a robot model (in
config/default/XXX/in the installation folder), which includes - generic configuration (in
config/default/generic/in the installation folder).
This makes the configuration easy to maintain.
Given the rules for the hierachy and for parent destinations, it is very much possible to specify the same key multiple times. In that case the key that is read last overwrites any previous one of the same name. In particular, a destination always overrides its parent.
Appending¶
It is also possible to append values to an array, by adding a + to the variable name as such:
{ "array": [1, 2, 3] }
{ "array+": [4, 5, 6] }
The resulting array config value will be [1, 2, 3, 4, 5, 6].
Command line¶
You can also supply configuration on the command line.
For example, to set MyModule.max_velocity to 5, append
--MyModule.max_velocity 5 to the command line.
Values are read as JSON objects. Make sure to use the correct quoting according
to the shell you use.
When setting a boolean value to true, you can omit the value and just give
the key.
Arrays and objects can be provided on the command line as follows:
command --array [1, 2, 3, 4] --object {"field": 1234, "array": ["a", "b", "c"]}
Config keys given at the command line are read as the ultimate last ones, so they override any previous keys with the same names. This is useful for testing out certain values without constantly having to edit files.
Assignment¶
While some config keys are read explicitly by the application, most of the assignment happens automagically.
Modules¶
A module that is started with the name MyModule will automatically be
assigned all configuration below the MyModule. key.
From then on it behaves like a class (see below).
Classes¶
If a configuration key is applied to an instance of a VNX class, the members of the class are assigned the subkeys where the names match.
For example if you have an object of the class
class Test {
string name;
int value;
vector<int> numbers;
Test2 other_one;
}
and you assign it the config
{
"name": "Picard",
"value": 1234,
"numbers": [1, 2, 3, 4],
"other_one": {
"what": "ever"
}
}
then all the fields get assigned the config key with the matching name.
Notice that other_one is another object which will get the same treatment
recursively with the embedded config object.
Fields without a matching config key are default initialized and spare keys without a matching field are silently ignored.
User Management¶
The authentication model is based on users who may or may not have permission to perform certain actions. Without authentication, by default, only a limited number of actions are available.
Every user has a name and a password which are used for authentication.
Login¶
Command line tools usually provide the -u <username> switch to provide a
user name.
Please refer to the documentation of the respective tool.
Graphical tools usually provide a graphical way of authentication.
Permissions¶
Most API functions require a certain permission to be executed. If the permission is not held by the user an error is returned or thrown.
Every user has a set of access roles and every access role has a set of permissions. The permissions of a user consist of the permissions of their access roles. Mindful assignment to access roles allows for a fine-grained access control in a multi-user environment.
See vnx.access_role_e for the set of default access roles and their permissions.
Configuration¶
Available access roles and their sets of permissions can be configured
via the config key vnx.authentication.permissions which is an object with access roles
(as strings) as keys and a list of permissions (as strings) as values.
Users and their access roles can be configured with the key vnx.authentication.users which
is a list of user objects.
Note that the passwords for the config map vnx.authentication.passwd are usually kept separately
(in a subdirectory) so that they can be protected from reading and writing.
Here is the default configuration config/default/generic/vnx/authentication.json:
{
"users": [
{
"name": "neo-user",
"access_roles": ["USER"]
},
{
"name": "neo-installer",
"access_roles": ["INSTALLER"]
},
{
"name": "neo-admin",
"access_roles": ["INSTALLER", "ADMIN"]
}
],
"permissions": {
"OBSERVER": [
"READ_CONFIG",
],
"USER": [
"pilot.permission_e.MOVE",
"pilot.permission_e.CHARGE",
"pilot.permission_e.INITIALIZE",
"pilot.permission_e.RECORD_DATA",
"pilot.permission_e.EXECUTE_SCRIPT",
"vnx.addons.permission_e.READ_DIRECTORY",
"vnx.addons.permission_e.FILE_DOWNLOAD",
],
"TASK": [
"VIEW",
"CONST_REQUEST",
"pilot.permission_e.MOVE",
"pilot.permission_e.CHARGE",
"pilot.permission_e.RECORD_DATA",
"pilot.permission_e.RELAY_CONTROL",
"pilot.permission_e.DISPLAY_CONTROL",
],
"INSTALLER": [
"pilot.permission_e.MOVE",
"pilot.permission_e.CHARGE",
"pilot.permission_e.INITIALIZE",
"pilot.permission_e.RECORD_DATA",
"pilot.permission_e.REMOTE_CONTROL",
"pilot.permission_e.RELAY_CONTROL",
"pilot.permission_e.DISPLAY_CONTROL",
"pilot.permission_e.CHANGE_GRIDMAP",
"pilot.permission_e.CHANGE_ROADMAP",
"pilot.permission_e.UPLOAD_SCRIPT",
"pilot.permission_e.EXECUTE_SCRIPT",
"pilot.permission_e.INTERVENE_SCRIPT",
"vnx.addons.permission_e.READ_DIRECTORY",
"vnx.addons.permission_e.FILE_DOWNLOAD",
"vnx.addons.permission_e.FILE_UPLOAD",
"vnx.addons.permission_e.FILE_DELETE",
]
}
}
As can be seen, built-in permissions (of type vnx.permission_e)
such as VIEW and READ_CONFIG can be specified without the full namespace.
A permission can also be removed by adding a ! in front of the name: !VIEW.
For more information regarding configuration files see Configuration.
Adding Users¶
To add new users create a config file config/local/vnx/authentication.json:
{
"users+": [
{
"name": "foo",
"access_roles": ["USER", ...]
},
....
]
}
By removing the + in users+ you can discard the default users
which were set in config/default/generic/vnx/authentication.json.
Tools¶
There is a collection of command line tools to communicate with a running program instance.
Common command line parameters are:
-n <node>- supply a way to connect to the process. It can be a UNIX socket or
a network address in the form
host:port. -u <user>- authenticate with the given user name. You will be asked to enter the password before the connection is made.
On Linux the tools are found in /opt/neobotix/pilot-core/bin/ or /opt/neobotix/pilot-gtkgui/bin/.
On Windows the tools are found in the bin folder.
pilot_execute¶
To execute a custom Lua Script on the platform:
pilot_execute -n localhost:5555 -u neo-admin -f my_script.lua
Above command will run until the script exits. To return immediately add the -a option.
Requires permission UPLOAD_SCRIPT.
vnxservice¶
To call a method on a module:
vnxservice -n localhost:5555 -u neo-user -x HybridPlanner move_to_station Station1 {"max_velocity": 0.5}
To get an overview of available methods:
vnxservice -n localhost:5555 -i HybridPlanner
vnxgraph¶
To create a graph of a running VNX process:
vnxgraph -n localhost:5555 > graph.dot
dot -Tsvg graph.dot > graph.svg
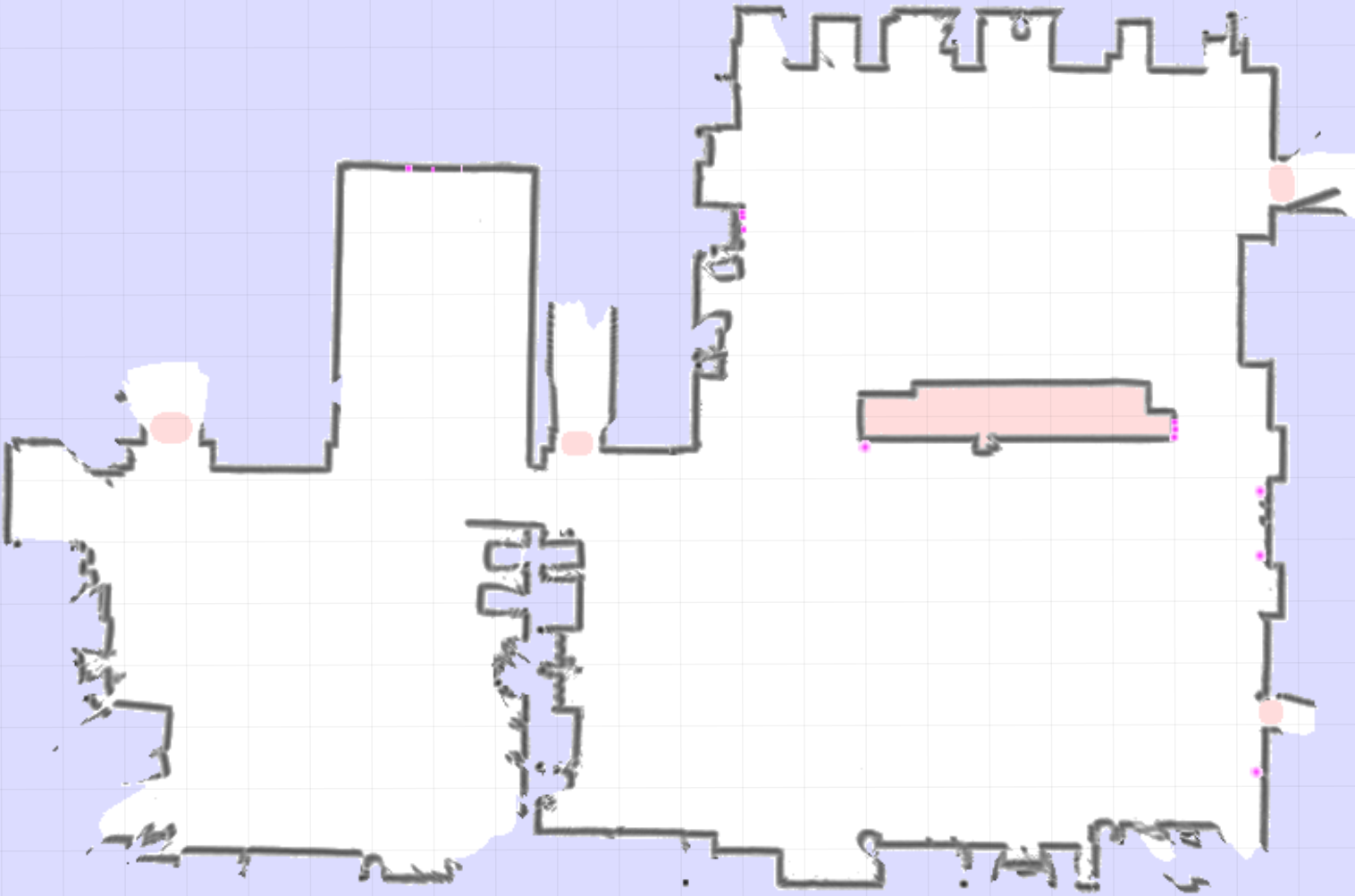
Grid Map¶
The Grid Map is an image representing an occupancy grid map, created via a SLAM mapping algorithm. It has two layers: normal occupancy and reflector occupancy, both consisting of 8-bit data per pixel / cell.
See also: pilot.GridMapData, pilot.OccupancyMapData
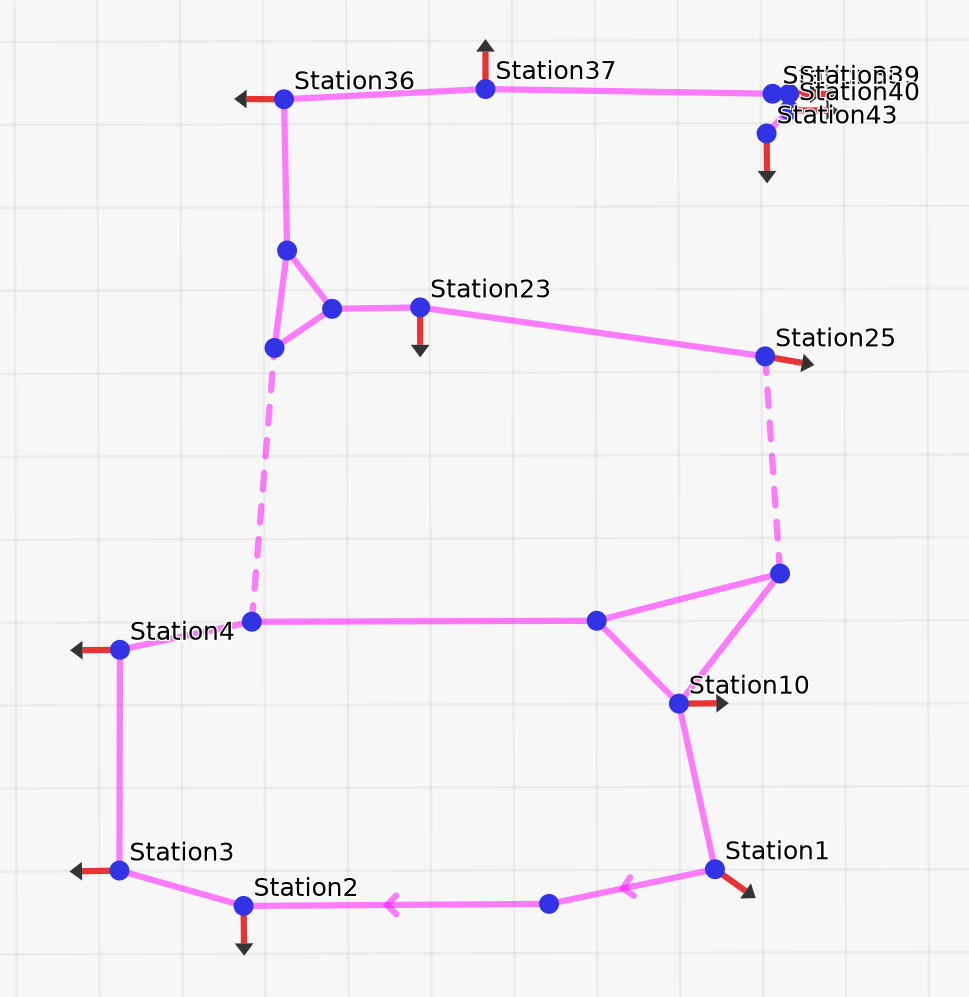
Road Map¶
The Road Map is a navigation map created by hand using the GTK GUI. It contains road segments where a platform should drive on, including a lot of additional parameters that can be set.
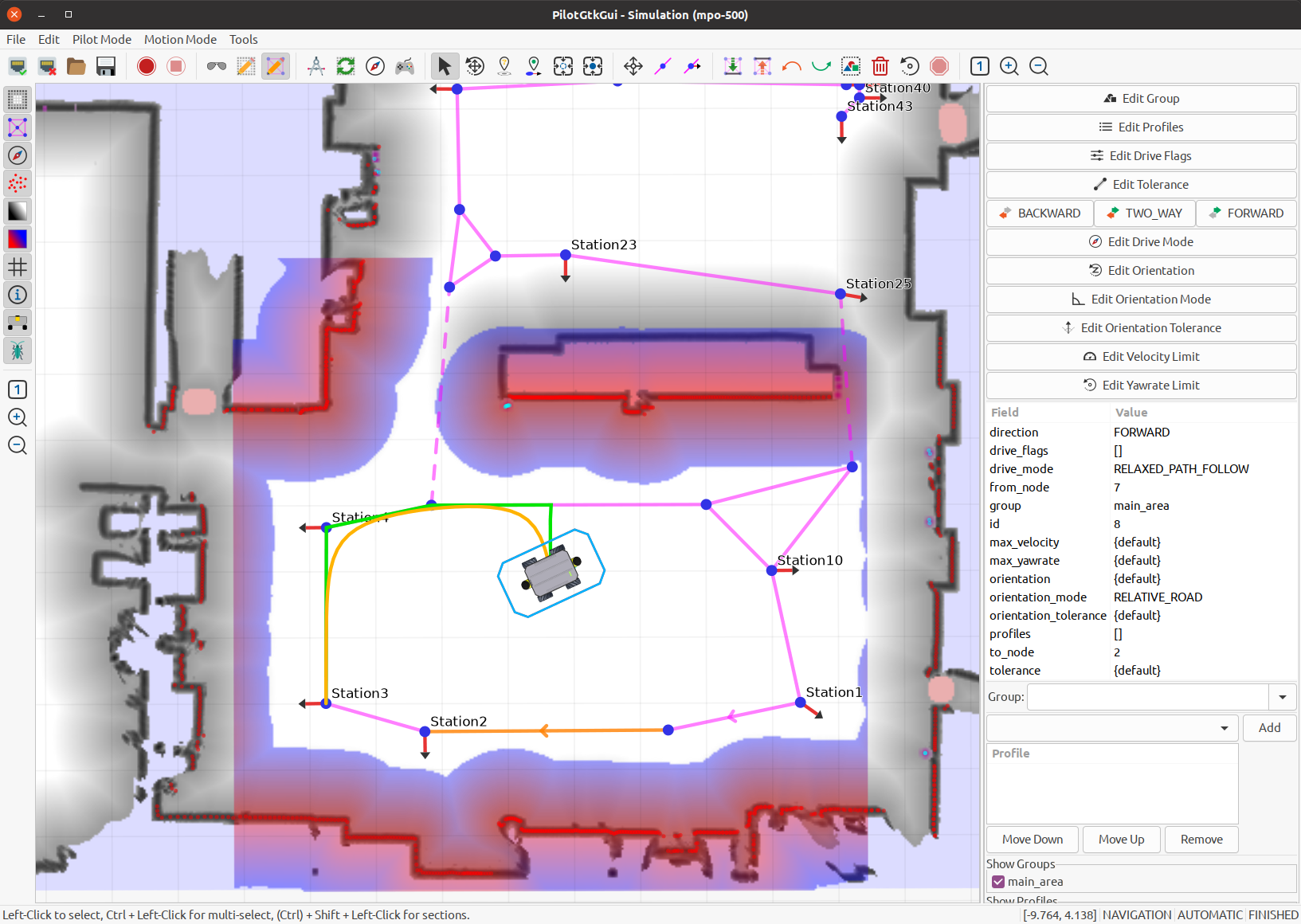
GTK GUI¶
The PlatformPilot GTK GUI provides a means to create maps, upload / download data to / from a platform, as well as visualize various data and control the platform.
Web GUI¶
You can interact with the platform using the web interface. You can access it using a web browser of your choice (Firefox and Chrome/Chromium are preferred though) by navigating to <robot_ip>:8888.
Toolbar¶
Toolbar consists of three parts:
- App Menu
- Navigate through the app.
- Page title
- Display information about current page.
- Action buttons
- On every page you will see at least the login / logout button. Other buttons will be explained in the corresponding section.
Map¶
Changing Pilot Modes¶
To switch into navigation mode:

Navigation mode allows for autonomous operation.
If needed initialize the localization first via the Pose Estimate Tool, see below.
To create a new Grid Map switch to the mapping mode:

Now you can move the platform around using the hardware joystick.
The new Grid Map will be created and updated while driving around. When the mapping process is finished you can upload the new map to the platform by clicking the Save button.
Note
Requires permissions of neo-installer or neo-admin when connecting remotely.

Set Goal Pose¶

Left Click / Tap and move to define a new goal pose. Red dot on the icon will indicate this mode is enabled.
Set Goal Station¶

Left Click / Tap on a map station to set a new goal station. Red dot on the icon will indicate this mode is enabled.

Pose Estimate Tool¶

Left Click / Tap and move to define a pose estimate (initialize localization). Red dot on the icon will indicate this mode is enabled.
Set Pose Tool¶
In simulation mode it is possible to “teleport” the platform via:

Left Click / Tap and move to define a pose. Red dot on the icon will indicate this mode is enabled.
Data Recording¶
To start a recording:

Note
The resulting file will be in user/data/.
To stop a recording:

Note
This button is only enabled when a recording is active.
Adjust View¶

This mode activates ovelayed controls for zooming and rotating the view. Also the view can be moved around by Left Click / Tap and move.
Settings¶

In this context menu you can toggle visibility of various map layers.
Note
The same context menu can be accessed by Right Click / Tap & Hold.
Tip
Displaying Lidar Points and Local Cost Map is CPU intensive. Disable this layers to reduce CPU / GPU usage.
Logs¶
On this page the last 100 PlatformPilot log messages can be viewed. It is also possible to stop / resume message polling and filter messages by log level using action buttons.
Task Editor¶
Introduction¶
The TaskEditor offers visual way to create and manage tasks for the PlatformPilots TaskHandler module. It allows users to generate Lua programs using graphical blocks by dragging and linking them. It also offers easy access to the PlatformPilots API.
After a little training, the creation of programs is done intuitively. So that even complex sequences of task can be implemented very fast.
The TaskEditor is build on top of the Blockly library. Further information:
Toolbox¶
The toolbox is the side menu from whence the user may drag and drop blocks into the workspace.
There are two types of blocks with and without return value. Blocks without return value can be used directly to build a program workflow. Blocks with a return value are used as input for other blocks (i.e. variables or parameters).
The following blocks offer direct access to PlatformPilots API. See Lua Script.
General
Hardware
Information Requests
Log
Movement
Station List
This block contains a combobox with all stations available in the currently loaded road map.
User Input
The following blocks offer access to basic code concepts like variables, logical expressions and loops.
Functions
Lists
Logic
Loops
Math
Text
Variables
License¶
PlatformPilot is individually licensed under the terms agreed-upon with Neobotix GmbH.
Third-party software¶
PlatformPilot makes use of the following third-party software under their respective licenses. Unless stated otherwise, the software packages have not been modified by us and can be retrieved from their project homepages and/or repositories.
zlib (zlib license)
libpng (libpng license)
libjpeg (libjpeg license)
This software is based in part on the work of the Independent JPEG Group.
CImg (CeCILL-C license)
LUA (MIT License)
Copyright © 1994–2021 Lua.org, PUC-Rio.
See below for the license text.
url-cpp (MIT License)
Copyright (c) 2016-2017 SEOmoz, Inc.
See below for the license text.
llhttp (MIT License)
Copyright Fedor Indutny, 2018.
See below for the license text.
Open62541 (Mozilla Public License Version 2.0)
Eigen3 (Mozilla Public License 2.0)
OpenCL headers / OpenCL ICD loader (Apache License)
Copyright (c) 2008-2020 The Khronos Group Inc.
Several packages by Automy Inc. (MIT License)
Copyright (c) 2021 Automy Inc.
See below for the license text.
License Texts¶
MIT License¶
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the “Software”), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED “AS IS”, WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
Changelog¶
Release 1.3¶
Version 1.3.0 (August 2021)¶
- Added OPC-UA Client/Server certificate support
- Added LUA functions and corresponding TaskEditor blocks:
is_chargig()get_battery_remaining()reset_motors()
- Added
Event::levelto allow sorting by low/high level events. wait_for_joystick()waits for activation nowLaserCalibrationnow also calibrates sensor X/Y position- Added RealSense2 support
- LFP battery charge auto cycling between 90 and 100 % (see
RelayBoardNode::battery_typeconfig) - Added
SystemState::is_charging
Release 1.2¶
Version 1.2.0 (June 2021)¶
- New
HttpServerimplementation, no longer using libmicrohttpd.- Supports Server-Sent-Events (SSE), via
/api/stream/... - Deflate response compression (multi-threaded)
- Asynchronous chunked transfers
- Supports Server-Sent-Events (SSE), via
localization.statustopic is also being recorded now.- New
LocalPlannerfunctions:await_goal(),await_goal_ex(...),cancel_goal_await() LocalPlanner::pause()now has an optionalbool em_stopparameter to enable emergency stopping.- OPC-UA write variable support via
Proxy::write_variable()andProxy::write_object_variable(). TaskHandlernow supports script parameters viaexecute_file()andexecute_program()which are passed on to themain(...)function in LUA.- Sending a new goal while driving works as expected now, planners wait for platoform to stop before planning new path.
Kinematics_CanNodefix for CAN bus initialization, now attempts to re-initialize until successful.- New
TaskHandlerfunctions:get_time_sec(),get_time_millis(),get_time_micros() HttpSessionnow containssession_timeoutas well- Additional incident reporting for RelayBoard and MPO-700 homing.
SickMicroscan3fix for reflector detection- OPC-UA Proxy authentication support via
usernameandpasswordconfigs. TaskHandlerscripts haveREQUESTpermission nowUSER(neo-user) hasINTERVENE_SCRIPTpermissions now
Programmer’s Manual¶
VNX Interface¶
The native VNX binary protocol allows to communicate with the PlatformPilot in a C++ application, either via TCP/IP, UNIX socket or a direct intra-procress connection.
The communication is provided via the vnx.Server and vnx.Proxy modules.
Server¶
To enable a vnx.Server create a config file config/local/vnx_server_map:
[
["TcpServer_1", "0.0.0.0:1234"],
["UnixServer_1", "/tmp/mysocket.sock"]
]
This will start two VNX servers listening on TCP/IP address 0.0.0.0:1234 and UNIX socket /tmp/mysocket.sock respectively.
By default a VNX server is listening on TCP/IP address 0.0.0.0:5555, which requires a login for most funtionality.
To enable user authentication, which is recommended for TCP/IP servers, create a config file config/local/TcpServer_1.json:
{
"use_authentication": true,
"default_access": "OBSERVER"
}
This will require a login to gain more than the default_access permissions.
If use_authentication is set to false any user has full permissions and no login is necessary.
Proxy¶
To run a vnx.Proxy which connects to another VNX server
create a config file vnx_proxy_map which is used by your process:
[
["Proxy_1", "127.0.0.1:5555"],
["Proxy_2", "/tmp/mysocket.sock"]
]
The above proxies will be available under the module names Proxy_1 and Proxy_2.
To import / export topics and forward services create a config file for each proxy.
For example Proxy_1.json:
{
"import_list": [
"input",
"sensors.raw_data",
"platform.system_state",
"platform.battery_state",
"platform.emergency_state",
"kinematics.drive_state"
],
"export_list": [
"platform.drive_cmd",
],
"forward_list": [
"PlatformInterface"
],
"time_sync": true
}
To gain required permissions a login needs to be performed at runtime:
#include <vnx/vnx.h>
#include <vnx/ProxyClient.hxx>
std::string user;
if(vnx::read_config("user", user)) {
vnx::ProxyClient proxy("Proxy");
proxy.login(user, vnx::input_password("Password: "));
}
Clients¶
A Client is a way to communicate with a module via (remote) procedure calls.
Synchronization¶
There are synchronous clients and asynchronous clients. A method call on a synchronous client blocks until the result arrives. A method call on an asynchronous client returns immediately and gives you the possibility to supply callback functions that notify you about the result.
Specific Clients¶
Every module has a synchronous and an asynchronous client.
If the module class is called MyModule, the clients are called MyModuleClient
and MyModuleAsyncClient.
In order to instantiate them, you also need to know the runtime name of the module
(not the name of the class).
Here is an example on how to use the clients for MyModule that is running
under the name MyModule_name to call its method void do_something(int, string).
#include <package/MyModuleClient.hxx>
#include <package/MyModuleAsyncClient.hxx>
using namespace package;
MyModuleClient sync_client("MyModule_name");
sync_client.do_something(42, "hello");
std::shared_ptr<MyModuleAsyncClient> async_client =
std::make_shared<MyModuleAsyncClient>("MyModule_name");
add_async_client(async_client);
async_client->do_something(42, "hello",
[](void) {
std::cout << "OK" << std::endl;
},
[](const vnx::exception& ex) {
std::cout << "FAIL: " << ex.what() << std::endl;
}
);
The callback functions for asynchronous clients are of the forms
void(const T&) (where T is the return type, or void) and void(const vnx::exception&)
respectively. Supplying either of them is optional and defaults to a null function.
Generic Clients¶
With a generic client, you can communicate with any module. The handling is similar to the specific case, only this time you call methods by their name and supply the parameters as a vnx.Object. The names of the method and the parameters have to match the interface definition.
#include <vnx/vnx.h>
vnx::Object args;
args["number"] = 42;
args["message"] = "hello");
vnx::GenericClient sync_client("MyModule_name");
std::shared_ptr<const vnx::Value> ret = sync_client.call("do_something", args);
std::cout << "OK: " << ret->get_field_by_index(0) << std::endl;
std::shared_ptr<vnx::GenericAsyncClient> async_client =
std::make_shared<vnx::GenericAsyncClient>("MyModule_name");
add_async_client(async_client);
async_client->call("do_something", args,
[](std::shared_ptr<const vnx::Value> ret) {
std::cout << "OK: " << ret->get_field_by_index(0) << std::endl;
},
[](const vnx::exception& ex) {
std::cout << "FAIL: " << ex.what() << std::endl;
}
);
The callback functions are of the form
void(std::shared_ptr<const vnx::Value>) and void(const vnx::exception&)
respectively. Supplying either of them is optional and defaults to a null function.
Compiling¶
Example on how to compile your C++ application:
g++ -std=c++11 application.cpp -I /opt/neobotix/pilot-core/include \
-L /opt/neobotix/pilot-core/lib -lpilot_core -lvnx_base
/opt/neobotix/pilot-core can also be replaced by /opt/neobotix/pilot-gtkgui, if you have the GTK GUI installed.
Example¶
Connecting to the PlatformPilot and sending goals to HybridPlanner.
config/default/vnx_proxy_map:
[["Proxy", ""]]
We do not specify an address in the config above, since we want to give a custom address on the command line later.
config/default/Proxy.json:
{"forward_list": ["HybridPlanner"]}
move_to_stations.cpp:
#include <vnx/vnx.h>
#include <vnx/ProxyClient.hxx>
#include <pilot/HybridPlannerClient.hxx>
using namespace pilot;
int main(int argc, char** argv)
{
std::map<std::string, std::string> options;
options["u"] = "user";
vnx::init("move_to_stations", argc, argv, options);
std::string user;
if(vnx::read_config("user", user)) {
vnx::ProxyClient proxy("Proxy");
proxy.login(user, vnx::input_password("Password: "));
}
HybridPlannerClient planner("HybridPlanner");
goal_options_t goal_options;
goal_options.max_velocity = 0.5;
goal_options.drive_mode = drive_mode_e::STRICT_PATH_FOLLOW;
while(vnx::do_run()) {
try {
planner.move_to_station("Station1");
vnx::log_info() << "Station1 has been reached!";
planner.move_to_station("Station2", goal_options);
vnx::log_info() << "Station2 has been reached!";
const vnx::Hash64 job_id = vnx::Hash64::rand();
planner.move_to_station("Station3", {}, job_id);
vnx::log_info() << "Station3 has been reached! (job " << job_id << ")";
}
catch(const std::exception& ex) {
vnx::log_error() << "move_to_station() failed with: " << ex.what();
break;
}
}
vnx::close();
}
Compiling:
g++ -std=c++11 -o move_to_stations move_to_stations.cpp \
-I /opt/neobotix/pilot-core/include \
-L /opt/neobotix/pilot-core/lib -lpilot_core -lvnx_base
Running:
$ ./move_to_stations -c config/default/ --Proxy.address ~/pilot/.pilot_main.sock
Proxy.address = "/home/neobotix/pilot/.pilot_main.sock"
Proxy.forward_list = ["HybridPlanner"]
config = ["config/default/"]
vnx_proxy_map = [["Proxy", ""]]
[Proxy] INFO: enable_forward('HybridPlanner', 100, 1000)
[Proxy] INFO: Connected to /home/neobotix/pilot/.pilot_main.sock
[move_to_stations] INFO: Station1 has been reached!
[move_to_stations] INFO: Station2 has been reached!
[move_to_stations] INFO: Station3 has been reached! (job 13373535902967275021)
...
Connecting to .pilot_main.sock avoids having to login with a username and password to be able to move the platform.
JSON-RPC Interface¶
This interface uses the JSON-RPC protocol in version 2.0.
The corresponding proxy module vnx.JRPC_Proxy is similar to the vnx.Proxy and mostly follows the same protocol, only it wraps its messages into appropriate JSON objects.
Message format¶
A message in our setting of the JSON RPC protocol may look like this:
{
"jsonrpc": "2.0",
"id": "123some_id456",
"method": "MyModule.some_method",
"params": {
"first": "Hello",
"second": 4321
}
}
Some remarks:
The
idis optional. If you provide it, you will get a response message, otherwise you will get nothing. This includes error messages!methodconsists of a module name and its method name, separated by a dot. If you omit the module name (but keep the dot), the request is directed at the proxy module itself.The proxy module has a method
select_serviceto assign a module name for the rest of the connection:{ "jsonrpc": "2.0", "id": "123some_id456", "method": ".select_service", "params": { "service_name": "MyModule" } }
Now you can omit the module name (and the dot) in future requests.
paramsis an object indexed by the names of the parameters as defined in the interface of the module. You can also supply a list instead, although that is not encouraged.
Server¶
To enable a vnx.JRPC_Server create a config file config/local/vnx_jrpc_server_map:
[
["JRPC_Server", "0.0.0.0:5556"],
...
]
This will start a JSON RPC server that listens on the TCP/IP address 0.0.0.0:5556.
Connecting¶
Open a TCP connection to the port of the server. You should be greeted
with a welcome message (method .on_remote_connect) that you can safely ignore.
To authenticate use the on_login method of the proxy:
{
"jsonrpc": "2.0",
"method": ".on_login",
"params": {
"name": "username",
"password": "23f/*...*/995"
}
}
where password is a SHA-256 hash of the actual password.
On success you should receive a call to .on_remote_login providing some
information on your established session.
Return Values¶
Note
You will only receive return values if you supply the id field in your request.
Return values are wrapped inside a success message with the result field
holding the actual return value. A successful call to
RoadMapPlanner.find_station may look like this:
{
"__type": "vnx.JRPC_Success",
"jsonrpc": "2.0",
"id": 5566,
"result": {
"__type": "pilot.MapStation",
"drive_flags": [],
"goal_tolerance": {"__type": "pilot.vector_3f_param_t", "type": "DEFAULT", "x": {"__type": "pilot.float_param_t", "type": "DEFAULT", "value": 0}, "y": {"__type": "pilot.float_param_t", "type": "DEFAULT", "value": 0}, "z": {"__type": "pilot.float_param_t", "type": "DEFAULT", "value": 0}},
"goal_tune_time": {"__type": "pilot.float_param_t", "type": "DEFAULT", "value": 0},
"group": "",
"id": 120,
"name": "Station120",
"orientation": -3.13343,
"position": [-0.611983, 2.81928],
"profiles": [],
"tolerance": {"__type": "pilot.float_param_t", "type": "DEFAULT", "value": 0}
}
}
The result of calling a void method has a null return value:
{
"__type": "vnx.JRPC_Success",
"jsonrpc": "2.0",
"id": 43,
"result": null
}
Errors¶
Note
You will only receive errors if you supply the id field in your request.
If your request failed, you will get an error response. It contains an error
field with an object giving an error code, a short message and the actual
error object.
When the method you called throws an exception, the error will look like this:
{
"__type": "vnx.JRPC_Failure",
"jsonrpc": "2.0",
"id": 43,
"error": {
"__type": "vnx.JRPC_Error",
"code": 500,
"message": "roadmap station does not exist",
"data": {
"__type": "vnx.InternalError",
"what": "roadmap station does not exist"
}
}
}
This shows an error that you get if you lack a permission to do something:
{
"__type": "vnx.JRPC_Failure",
"jsonrpc": "2.0",
"id": 42,
"error": {
"__type": "vnx.JRPC_Error",
"code": 403,
"message": "permission denied (pilot.permission_e.MOVE)",
"data": {
"__type": "vnx.PermissionDenied",
"what": "permission denied (pilot.permission_e.MOVE)",
"dst_mac": 0,
"method": "pilot.HybridPlanner.set_goal_station",
"permission": "pilot.permission_e.MOVE"
}
}
}
See vnx.JRPC_Error for a list of error codes.
Topics¶
As with the VNX protocol, subscribing to a topic is done with the enable_export
method of the proxy:
{
"jsonrpc": "2.0",
"method":".enable_export",
"params": {
"topic_name": "some.topic"
}
}
Received samples will have the following form:
{
"jsonrpc": "2.0",
"method": "!some.topic",
"params": {
"seq_num": 42,
"value": {"__type": "some.Datatype", "time": 1600000023, "some_more": "fields"}
}
}
Notice that we are relaxing the notion of a “method” here: The initial !
makes clear that it actually refers to a topic and the parameters really just
hold the value.
Using the same format in the other direction, you can also publish samples on the named topic (given sufficient permissions).
HTTP Interface¶
The HTTP REST API provides access to almost any functionality of the PlatformPilot via the HTTP protocol.
The HTTP server is enabled by default on port 8888, however it can be disabled by setting enable_http_server to false.
The REST API is available on the path http://localhost:8888/api/. (replace localhost with your target machine)
See also HttpProxy.
Login¶
Some functionality requires special permissions, see User Management.
To gain necessary permissions you need to login to the HTTP server as follows:
curl -I "http://localhost:8888/server/login?user=neo-user&passwd_plain=neobotix"
HTTP/1.1 200 OK
...
Set-Cookie: hsid=7ac1b14c66b6f323-0000d026d3eff249-2d4c9774cd3accb8; Path=/; Max-Age=86400; SameSite=Strict;
The response will contain a session cookie which can be used as follows:
curl -H "Cookie: hsid=7ac1b14c66b6f323-0000d026d3eff249-2d4c9774cd3accb8" http://localhost:8888/api/request/...
Services¶
All modules of the PlatformPilot are available via the path /api/request/.
To get an overview of the available modules:
curl http://localhost:8888/api/request/
["GlobalCostMap/", "GlobalPlanner/", "GridLocalization/", "HybridPlanner/", ...]
The available methods of a module can be queried as follows:
curl http://localhost:8888/api/request/HybridPlanner/
["append_goal", "append_goal_position", "append_goal_positions", "append_goal_station", ...]
A method can be called as follows:
curl -X POST http://localhost:8888/api/request/PilotServer/get_state
{"__type": "pilot.PilotState", ...}
curl -H "Cookie: ..." -X POST -d '{"name": "Station1"}' \
http://localhost:8888/api/request/HybridPlanner/set_goal_station
The parameters of a function are supplied as a JSON object via POST data.
You may need to be logged in to access certain functions, see above.
Topics¶
Almost all topics of the PlatformPilot are available via the path /api/topic/.
To get an overview of the available topics:
curl http://localhost:8888/api/topic/
["input/", "local_planner/", "navigation/", "platform/", "sensors/", "task_handler/", "tf/", "tfd/", "vnx/"]
curl http://localhost:8888/api/topic/platform/
["info", "odometry", "pilot_state", "system_state"]
To get the latest sample data of a topic:
curl http://localhost:8888/api/topic/platform/odometry
{"__type": "pilot.Odometry", "time": 1613656049067588, ...}
To get a tree of the lastest sample data of a domain:
curl http://localhost:8888/api/topic/platform
{"info": {"__type": "pilot.PlatformInfo", ...}, ...}
To publish a data sample on a topic:
curl -H "Cookie: ..." -X POST -d '{"topic": "test.topic", "sample": {"__type": "pilot.Pose2D", ...}}' \
http://localhost:8888/api/request/HttpProxy/publish
Note that a __type field needs to be specified containing the type name of the sample, such as pilot.Pose2D for example.
Configuration¶
The current configuration tree can be viewed via the path /api/config/.
To access protected configuration values, a special permission PROTECTED_CONFIG is required, see vnx.permission_e.
To get an overview of the available config options:
curl http://localhost:8888/api/config/
["GlobalCostMap/", "GlobalPlanner/", "GridLocalization/", "GridMapping/", ...]
curl http://localhost:8888/api/config/GridLocalization/
["broadcast_tf", "confidence_gain", "constrain_threshold", "constrain_threshold_yaw", "gain_factor", ...]
To query a specific config value:
curl http://localhost:8888/api/config/GridLocalization/gain_factor
0.01
To query a sub-tree of the configuration:
curl http://localhost:8888/api/config/GridLocalization
{"broadcast_tf": true, "confidence_gain": 0.01, "constrain_threshold": 0.1, "constrain_threshold_yaw": 0.2, "gain_factor": 0.01, ...}
To query the entire configuration tree:
curl http://localhost:8888/api/config
{...}
Log¶
The terminal output log messages are available via the path /api/log/.
Each message is of type vnx.LogMsg.
To get all errors which occured since startup:
curl http://localhost:8888/api/log/errors
[...]
To get all recent messages:
curl http://localhost:8888/api/log/recent
{"1": [...], "2": [...], "3": [...], "4": [...]}
To get recent warnings only:
curl http://localhost:8888/api/log/recent/2
[...]
The log levels are as follows:
- 1 = ERROR
- 2 = WARN
- 3 = INFO
- 4 = DEBUG
Log messages are also written to disk and can be accessed via http://example:8888/user/data/logs/.
Events¶
A history of events is available via the path /api/events/.
Each entry is of type pilot.Event or any of it’s derived types such as pilot.Incident.
To get a list of recent events:
curl http://localhost:8888/api/events/recent
[...]
To get recent error events only:
curl http://localhost:8888/api/events/errors
[...]
The latest events are at the end of the respective list.
Views¶
For certain data types there are special views available via the path /api/view/.
To get a cost map (see pilot.CostMapData) as a PGN image:
curl "http://localhost:8888/api/view/cost_map?topic=navigation.local_cost_map&color=true&alpha=128" > local_cost_map.png
To get a grid map (see pilot.OccupancyMapData) as a PGN image:
curl "http://localhost:8888/api/view/occupancy_map?topic=navigation.grid_map&alpha=255" > grid_map.png
Lua Script¶
A Lua script that can be executed by the TaskHandler module must at least
have a main function. The default name is main, so the minimal script is:
function main()
-- do something
end
Command Reference¶
The following commands are available to Lua scripts through the programming interface.
Commands denoted void return true or false depending on whether the
command succeeded. Commands with a return type either return a value of that
type or nil if the command failed.
See https://en.wikipedia.org/wiki/Lua_(programming_language) for more information regarding the Lua script language itself.
Movement¶
The commands in this section take an optional parameter of type pilot.goal_options_t. If not given, the default values are used.
-
void
move_to_station(string name, goal_options_t options)¶ Moves the platform to the station named
name.
-
void
move_to_position(Pose2D position, goal_options_t options)¶ Moves the platform to the given position. See pilot.Pose2D.
-
void
move_to(MapStation station, goal_options_t options)¶ Moves the platform to the place described by
station. It may or may not be a station of the Road Map. See pilot.MapStation.
-
void
move(double dx, double dy, double dr, goal_options_t options)¶ Moves the platform in the given direction, as seen from the platform’s point of view (relative to
base_link). See Coordinate Systems.
-
void
cancel_goal()¶ Cancels the current goal (if any) which causes the platform to stop moving and the corresponding move command to fail. This command can be useful in an event handler.
User Input¶
-
int
wait_for_joystick()¶ Waits until any button on the active joystick is pressed and returns the ID of the button.
Waits until the button with ID
buttonis pressed on the active joystick.
-
void
wait_for_digital_input(int channel, bool state)¶ Waits until the digital input
channelreaches statestate. The digital inputs are enumerated from 0 to 15.
-
void
wait_ms(int period)¶ Pauses for
periodmilliseconds.
-
void
wait_sec(int period)¶ Pauses for
periodseconds.
-
void
wait_min(int period)¶ Pauses for
periodminutes.
-
void
wait_hours(int period)¶ Pauses for
periodhours.
Hardware¶
-
void
set_relay(int channel, bool state)¶ Sets the relay with id
channelto statestate.
-
void
set_digital_output(int channel, bool state)¶ Sets the digital output with id
channelto statestate. The digital outputs are enumerated from 0 to 15.
-
void
set_display_text(string text)¶ Prints
texton the first line of the LCD display. There is enough space for 20 characters.
-
void
charge()¶ Starts the charging process. Fails immediately if no charger is detected. Otherwise blocks until the charging is either finished or aborted.
-
void
start_charging()¶ Starts the charging process, i.e. activates the corresponding relay.
-
void
stop_charging()¶ Stops the charging process, i.e. deactivates the corresponding relay.
Information Requests¶
-
int
get_time_sec()¶ Returns the current time stamp in seconds.
-
int
get_time_millis()¶ Returns the current time stamp in milliseconds.
-
int
get_time_micros()¶ Returns the current time stamp in microseconds.
-
Pose2D
get_position()¶ Returns the current position on the map. See pilot.Pose2D.
-
MapNode
find_station(string name)¶ Finds and returns the node / station called
name. See pilot.MapStation and See pilot.MapNode.
-
double
get_battery_remaining()¶ Returns the remaining battery charge as a percentage from 0 to 1.
-
bool
is_charging()¶ Returns
trueif charging is in progress.
Log¶
-
void
log_info(string message)¶ Generates a log message with priority INFO.
-
void
log_warn(string message)¶ Generates a log message with priority WARN.
-
void
log_error(string message)¶ Generates a log message with priority ERROR.
Control Flow¶
-
void
block()¶ Pauses execution of the main thread.
Warning
Only use in event handlers!
-
void
unblock()¶ Resumes execution of the main thread.
Warning
Only use in event handlers!
Builtin Functions¶
-
bool
auto_charge(string pre_stage1, string pre_stage2, string charge_station, float undock_distance, float max_velocity)¶ Automatically docks at a specified charging station, charges the batteries until full and then undocks from the station.
pre_stage1is a map station somewhere close (less than 1 m) to the charging station with an orientation close to the final docking pose. There should still be enough space to rotate fully without hitting the charging station.pre_stage2is a map station from where to start the docking process without having to rotate anymore. There should be about 10 to 20 cm of space between the contacts at this position.charge_stationis a map station where the platform makes contact with the charging station. It should be specified very precisely, within a few mm of accuracy.undock_distanceis the amount of distance to move backwards after finishing the charging process. The default is 0.25 m. Make sure the robot is allowed to move this much backwards, in case of a differential platform without a second laser scanner.max_velocityis the maximum velocity in [m/s] with which to dock and undock. The default is 0.05 m/s.Returns true if successful, false otherwise.
A
require 'neobotix'is needed to access this function in Lua script. PermissionsMOVEandCHARGEare required, see pilot.permission_e.
-
void
reset_motors()¶ Attempts to re-activate motors (clears any latched erros). Same action as when releasing EM stop.
A
require 'neobotix'is needed to access this function in Lua script. PermissionMOVEis required, see pilot.permission_e.
OPC-UA Functions¶
UA node ids are specified in Lua via an array of two values.
Numeric and string node ids are supported as follows: {0, 1337} or {1, "MyObject"}.
A require 'neobotix' is needed to access these functions in Lua script.
-
Variant
opc_ua_call(string proxy, pair<ushort, Variant> object, string method, vector<Variant> args)¶ Performs an OPC-UA call via the specified
proxyand returns the result of it.proxyis the name of a running vnx.opc_ua.Proxy module, see opcua_proxy_map.objectis an optional UA node id of the object for which to call the method. Can be set tonilin order to call a global method.methodis the method name (OPC-UA browse name).argsis an array of function parameters.In case of failure
nilorfalseis returned, depending on if the method has a return value (nil) or not (false). In case of multiple return values an array is returned.
-
Variant
opc_ua_read(string proxy, pair<ushort, Variant> object, string variable)¶ Reads an OPC-UA variable via the specified
proxy.proxyis the name of a running vnx.opc_ua.Proxy module, see opcua_proxy_map.objectis a UA node id of the object containing the variable. Setting it tonilis equivalent to callingopc_ua_read_global.variableis the variable name (OPC-UA browse name).Returns the value read, or
nilin case of failure.
-
Variant
opc_ua_read_global(string proxy, pair<ushort, Variant> variable)¶ Reads a global OPC-UA variable via the specified
proxy.proxyis the name of a running vnx.opc_ua.Proxy module, see opcua_proxy_map.variableis a UA node id of a global variable.Returns the value read, or
nilin case of failure.
-
bool
opc_ua_write(string proxy, pair<ushort, Variant> object, string variable, Variant value)¶ Writes a value to an OPC-UA variable via the specified
proxy.proxyis the name of a running vnx.opc_ua.Proxy module, see opcua_proxy_map.objectis a UA node id of the object containing the variable. Setting it tonilis equivalent to callingopc_ua_write_global.variableis the variable name (OPC-UA browse name).valueis the value to be written.Returns
trueon success,falsein case of failure.
-
bool
opc_ua_write_global(string proxy, pair<ushort, Variant> variable, Variant value)¶ Writes a value to a global OPC-UA variable via the specified
proxy.proxyis the name of a running vnx.opc_ua.Proxy module, see opcua_proxy_map.variableis a UA node id of a global variable.valueis the value to be written.Returns
trueon success,falsein case of failure.
Advanced¶
-
Variant
execute(string module, string method, Object params)¶ Executes a function
methodof the modulemodule. The parameters are specified as key-value pairs inparams. If the method does not take parameters,paramscan be omitted.If
methoddoes not have a return type, the command returnstrueorfalse, depending on whether it succeeded. Ifmethoddoes have a return type, either a value of that type is returned ornilon failure.See vnx.Variant and vnx.Object.
Warning
This command allows almost unlimited access to the functionality of PlatformPilot. However, it also allows you to leave the boundaries of safe operation and must therefore be considered dangerous.
Event Handlers¶
The following functions, if defined in your script, will be called upon specific events. Events are queued and the next event handler will only be called after the current one finished.
Be aware that the calls happen asynchronously to the main thread.
The two executions run in parallel while abiding to Lua’s
cooperative multithreading
model.
You can use the block() and unblock() functions to
avoid multithreading issues.
-
void
on_em_stop()¶ Is executed when the emergency stop button is pushed.
-
void
on_scanner_stop()¶ Is executed when the scanner emergency stop is triggered.
-
void
on_em_reset()¶ Is executed when a previous emergency situation (button and/or scanner) is resolved and the platform can move again.
Is executed when the joystick button with ID
buttonchanges its state from not pressed to pressed.
Is executed when the joystick button with ID
buttoncanges its state from pressed to not pressed.
-
void
on_digital_input_on(int channel)¶ Is executed when the digital input
channelchanges its state from off to on.
-
void
on_digital_input_off(int channel)¶ Is executed when the digital input
channelchanges its state from on to off.
-
void
on_battery_low()¶ Is executed when the battery drops below a low level.
-
void
on_battery_critical()¶ Is executed when the battery drops below a critical level.
Examples¶
Move to stations in the Road Map in a loop:
function main()
while true do
move_to_station("Station4");
move_to_station("Station9");
move_to_station("Station11");
wait_ms(1000);
end
end
Move randomly to any of the specified stations in a loop, abort in case of failure, stop when the Y button on the joystick is pressed:
function odyssey(stations)
repeat
wait_ms(1000);
index = math.random(1, #stations)
until not move_to_station(stations[index])
end
function on_joystick_button_pressed(button)
if button == 3 then
cancel_goal()
end
end
function main()
odyssey({"Station20", "Station10", "Station12", "Station14", "Station1"})
end
Dock to a charging station using special parameters:
move_to_station("ChargeStation", {
max_velocity = 0.1,
drive_flags = {"IGNORE_FOOTPRINT", "DISABLE_ROTATION"}
})
Undock from a charging station using a relative move command with special parameters:
move(-0.25, 0, 0, {
max_velocity = 0.1,
drive_flags = {"IGNORE_FOOTPRINT", "DISABLE_ROTATION"}
})
Using the built-in auto_charge(...) function to dock, charge and undock:
require 'neobotix'
function main()
auto_charge("PreStage1", "PreStage2", "ChargeStation", 0.25, 0.05);
end
Calling an OPC-UA method:
require 'neobotix'
function main()
ret = opc_ua_call("OPC_UA_Proxy", {1, "vnx.process"}, "get_name")
log_warn(ret) --> "pilot_main"
ret = opc_ua_call("OPC_UA_Proxy", {1, "HybridPlanner"}, "set_goal_stations", {
{"Station4", "Station3", "Station2"}
})
end
With opcua_proxy_map set to [["OPC_UA_Proxy", "opc.tcp://127.0.0.1:4840"]] and enable_opcua_server set to true.
Reading an OPC-UA variable:
require 'neobotix'
function main()
ret = opc_ua_read("OPC_UA_Proxy", {0, 2253}, "ServerArray")
log_warn(ret) --> ["urn:open62541.server.application"]
end
With opcua_proxy_map set to [["OPC_UA_Proxy", "opc.tcp://127.0.0.1:4840"]] and enable_opcua_server set to true.
OPC-UA Interface¶
The OPC-UA interface is provided by the vnx.opc_ua.Server and vnx.opc_ua.Proxy modules.
They allow to access internal modules via OPC-UA method calls, as well as call methods on another OPC-UA server via a Lua Script for example.
Server¶
To enable the vnx.opc_ua.Server set the following config option:
cd ~/pilot
echo true > config/local/enable_opcua_server
The server will listen on the address opc.tcp://0.0.0.0:4840.
The port 4840 is the default port for OPC-UA but you can also configure a
different port.
The server module is called OPC_UA_Server, so it can be configured
as usual
by a config file config/local/OPC_UA_Server.json.
Exports¶
- Pilot modules and their methods are advertised by the server as OPC-UA services.
The methods can be called according to the OPC-UA specification.
The list of exported services is given by the config key
export_services. - Pilot topics are advertised as OPC-UA variables and continually updated whenever
a new value is published.
The list of exported topics is given by the config key
export_topics.
To expand any of these lists, put a snippet like this in the configuration file:
{
"export_services+": [
"AnotherModule",
...
],
"export_topics+": [
"another.topic",
...
]
}
In order to replace any of the lists, omit the respective + character.
Security¶
The OPC-UA server supports encrypted communication. To enable it, you have to
create or obtain a certificate and put the path in the configuration.
You should also consider revisiting the key security_policies and adjust it
to your needs.
{
"certificate_file": "/some/path/to/server_cert.der",
"private_key_file": "/some/path/to/server_key.der",
"security_policies": [
"NONE",
"BASIC_256_SHA_256",
"AES_128_SHA_256_RSA_OAEP"
]
}
Proxy¶
To run a vnx.opc_ua.Proxy which connects to another OPC-UA server
create the following config file config/local/opcua_proxy_map:
[
["OPC_UA_Proxy_1", "opc.tcp://127.0.0.1:4840"],
...
]
The above proxy will be available unter the module name OPC_UA_Proxy_1, see Lua Script for examples on how to use it.
As usual, the module can be configured
by a config file config/local/OPC_UA_Proxy_1.json.
Security¶
You can configure encrypted communication of the Proxy module. First obtain or
generate a certificate and put the path in the configuration file. You should
also consider chooosing a reasonable value for the key security_mode.
{
"certificate_file": "/some/path/to/client_cert.der",
"private_key_file": "/some/path/to/client_key.der",
"security_mode": "SIGN_AND_ENCRYPT"
}
Certificates¶
To create self-signed certificates for the server and the proxy side, use the script provided by the open62541 project here as follows:
python create_self-signed.py -k 4096 -c server -u urn:open62541.server.application
python create_self-signed.py -k 4096 -c client -u urn:open62541.client.application
The -u switch sets the application URI that must match the one configured
in the module. The values given here are the defaults.
Data Types¶
Primitive data types are directly mapped to their OPC-UA counter parts, such as int to INT32, float to FLOAT, etc.
string is directly mapped to a OPC-UA STRING. Arrays of said types are directly mapped to OPC-UA arrays.
Anything else will be converted to JSON and transported via a LocalizedText object, with the locale set to JSON.
ROS Bridge¶
The ROS Bridge allows to integrate PlatformPilot into a ROS environment, such that it is possible to control the platform via ROS as well as visualize all data in RViz.
Installation¶
It is assumed that a ROS workspace has already been setup on the platform’s PC, for example ~/ros_workspace/.
See https://docs.neobotix.de/display/TUT/Client+PC+Setup for more information.
To install the ROS Bridge:
cd ~/ros_workspace/src/
git clone https://github.com/neobotix/pilot-ros-bridge.git
cd ~/ros_workspace/
catkin_make
The package depends on an already installed neobotix-pilot-core or neobotix-pilot-gtkgui package.
Running¶
To run the ROS bridge on the platform:
source ~/ros_workspace/devel/setup.bash
roslaunch pilot_ros_bridge mpo_700.launch
Replace mpo_700.launch with mpo_500.launch or mp_400.launch, depending on your platform.
It is also possible to run the ROS bridge on another PC, by adapting the pilot_node param in the launch file:
<param name="pilot_node" type="str" value="192.168.0.50:5555"/>
Replace 192.168.0.50 with the actual IP address of the platform.
In addition you can disable user authentication on the TCP server to allow for all functionality via the ROS Bridge.
To do this create a config file config/local/TcpServer.json:
{
"use_authentication": false
}
This is only necessary when running the ROS Bridge on another PC.
Topics¶
The following topics are enabled on the ROS bridge by default.
You can add more by adapting the config file config/default/generic/Pilot_ROS_Bridge.json in pilot-ros-bridge.
Export¶
"export_map": [
["platform.odometry", "/odom"],
["sensors.laser_scan.lidar_1", "/lidar_1/scan"],
["sensors.laser_scan.lidar_2", "/lidar_2/scan"],
["sensors.filtered_scan.lidar_1", "/lidar_1/scan_filtered"],
["sensors.filtered_scan.lidar_2", "/lidar_2/scan_filtered"],
["kinematics.drive_state", "/drives/joint_states"],
["mapping.grid_map", "/mapping/map"],
["mapping.grid_map_tile", "/mapping/map_tile"],
["mapping.grid_map_tile_ref", "/mapping/map_tile_ref"],
["navigation.grid_map", "/map"],
["navigation.grid_map_tile", "/map_tile"],
["navigation.map_pose", "/map_pose"],
["navigation.map_particles", "/particlecloud"],
["navigation.road_map", "/road_map"],
["navigation.global_path", "/global_path"],
["navigation.local_path", "/local_path"],
["navigation.local_cost_map", "/local_cost_map"],
["navigation.local_cost_map_overlay", "/local_cost_map_overlay"],
["navigation.global_cost_map", "/global_cost_map"],
["navigation.global_cost_map_overlay", "/global_cost_map_overlay"],
["local_planner.target_pose", "/local_planner/target_pose"],
["local_planner.predicted_pose", "/local_planner/predicted_pose"]
]
Import¶
"import_map": [
[["/cmd_vel", "geometry_msgs/Twist"], "platform.velocity_cmd"],
[["/initialpose", "geometry_msgs/PoseWithCovarianceStamped"], "navigation.initial_pose"],
[["/move_base_simple/goal", "geometry_msgs/PoseStamped"], "navigation.new_goal_pose"]
]
API Reference¶
Common Datatypes¶
void- empty space
bool- 8-bit boolean (default = false)
char- 8-bit signed integer (default = 0)
uchar- 8-bit unsigned integer (default = 0)
short- 16-bit signed integer (default = 0)
ushort- 16-bit unsigned integer (default = 0)
int- 32-bit signed integer (default = 0)
uint- 32-bit unsigned integer (default = 0)
long- 64-bit signed integer (default = 0)
ulong- 64-bit unsigned integer (default = 0)
float- 32-bit floating point number (default = 0)
double- 64-bit floating point number (default = 0)
string- UTF-8 string (default = “”)
vector<T>- A list of values of type T. (default = [])
optional<T>- An optional value of type T. (default = null)
set<t>- An ordered set of values of type T. (no duplicates)
map<K, V>- An ordered map with key type K and value type V. (no duplicate keys)
pair<K, V>- A pair of values of type K and V respectively.
T*- A value of type T or any derived type, or null. (default = null)
Coordinate Systems¶
Below are the most common coordinate systems used. In addition to those each sensor usually has its own coordinate system too.
Base Link (base_link)¶
The platform’s own coordinate system, usually the center of mass. X points forward, Y points to the left and Z points upwards.
The internal name is base_link.
Odometry (odom)¶
This is an arbitrary coordinate system with it’s origin at the starting position (at the time of power on) of the platform.
X and Y form the plane of movement, while Z is pointing upwards and aligned with gravity. Usually there is no motion in Z direction,
except when a roll and pitch sensor is installed.
The internal name is odom.
Map (map)¶
This is the coordinate system of the currenly used Grid Map and Road Map.
Usually the Grid Map is created first and it’s origin is the starting position of where the map was created initially.
X and Y form the plane of movement, while Z is pointing upwards and aligned with gravity.
The internal name is map.
Classes¶
basic.Transform3D¶
Class¶
Transform3D represents a 2D/3D transformation from a specified coordinate system to another. It can be described by a 4x4 matrix that transforms a 3D vector from the source coordinate system to the target coordinate system.
Fields¶
-
long
time¶ POSIX timestamp in [usec].
-
string
frame¶ Source coordinate system name.
-
string
parent¶ Target coordinate system name.
-
Matrix4d
matrix¶ The transformation matrix, such that left multiplying a vector transforms it from the source coordinate system
frameto the target coordinate systemparent. For example: target = matrix * [x, y, z, 1]^T. See math.Matrix4d.
math.Matrix4d¶
A 4x4 double (64-bit float) matrix, usually a 3D transformation matrix.
math.Vector2d¶
A 2D double (64-bit float) vector, usually a (x, y) position. Mathmatically a column vector, in JSON an array of 2 numbers.
math.Vector3d¶
A 3D double (64-bit float) vector, usually (x, y, z) for a 3D position, or (x, y, yaw) for a 2D pose. Mathmatically a column vector, in JSON an array of 3 numbers.
math.Vector3f¶
A 3D float vector, usually (x, y, z) for a 3D position, or (x, y, yaw) for a 2D pose. Mathmatically a column vector, in JSON an array of 3 numbers.
pilot.ActiveIncidents¶
Class¶
Contains the list of currently active incidents, which is periodically published on topic platform.active_incidents.
Fields¶
-
long
time¶ POSIX timestamp [usec]
-
vector<event_t>
events¶ List of active incidents, see pilot.event_t.
pilot.BatteryState¶
Class¶
BatteryState contains information regarding the platform’s batteries.
Inherits from pilot.Sample.
pilot.Beacon¶
pilot.CostMapData¶
Class¶
A map representing the navigation cost based on the proximity to walls and other obstacles.
Inherits from pilot.GridMapData.
Fields¶
-
static const uchar
PROHIBITED= 254¶
-
static const uchar
UNKNOWN= 255¶
-
float
cost_scale¶ obstacle distance scale [m]
distance = (1 - (cost / 200)) * cost_scale
-
Image8
cost¶ - 0 to 200 = cost
- 200 = wall
- > 200 = same as occupancy map
Methods¶
-
ImageF32
to_float() const¶ convert to float format (0 to 1)
-
Image8
to_rgba_image(int alpha) const¶ for visualization (with color)
-
Image8
to_rgba_mono_image(int alpha) const¶ for visualization (just grayscale)
-
static Vector4uc
to_rgba(int value, int alpha)¶ convert occupancy to RGBA
-
static Vector4uc
to_rgba_mono(int value, int alpha)¶ convert occupancy to RGBA mono
pilot.EmergencyState¶
Class¶
EmergencyState contains information regarding the platform’s emergency systems.
Inherits from pilot.Sample.
Fields¶
-
em_stop_state_e
state¶ Current EM Stop state, see pilot.em_stop_state_e.
If an emergency stop button has been pressed.
-
bool
is_scanner_stop¶ If a scanner stop was triggered.
pilot.Event¶
Class¶
Generic event type, as published on topic platform.events for example.
Fields¶
-
long
time¶ POSIX timestamp [usec]
-
event_t
event¶ Event data, see pilot.event_t.
-
Object
info¶ Additional information regarding the event, see vnx.Object.
pilot.ExecutionHistory¶
Class¶
A history of recent execution states of the TaskHandler.
pilot.ExecutionState¶
Class¶
ExecutionState contains information about the current state of the TaskHandler.
Inherits from pilot.Sample.
Fields¶
-
execution_state_e
status¶ Current execution state, see pilot.execution_state_e.
-
Hash64
jobid¶ Current program execution id. See vnx.Hash64.
-
string
program_name¶ Name of the running program.
-
Task *
task¶ Current task being executed, if any. See pilot.Task.
-
vector<StackFrame>
stack¶ Execution stack, most recent first. See pilot.StackFrame.
-
long
time_started¶ POSIX time stamp when program was started in [usec].
-
long
time_ended¶ POSIX time stamp when program has finised in [usec], zero otherwise (ie. still running).
-
bool
is_minor¶ True if current task is nothing major, for example log message output, etc.
pilot.Footprint¶
Class¶
Footprint describes the space needed by a platform, including the safety scanner fields with some additional padding.
Fields¶
-
vector<Vector2d>
points¶ List of 2D (x, y) [m, m] points in
base_linkcoordinates that form a polygon representing the footprint. The points should be specified either in clockwise or anti-clockwise direction.See Coordinate Systems.
pilot.GridMapData¶
Fields¶
-
string
name¶
-
long
last_modified¶ timestamp [usec]
-
float
scale¶ size of a pixel in [m]
-
Vector2d
origin¶ grid offset (map position of lower left pixel, world to map) [m]
-
double
orientation¶ grid rotation (world to map) [rad]
Methods¶
-
void
transform(Transform3D *sample)¶
-
Matrix4d
get_grid_to_frame() const¶ computes grid to ‘frame’ 2.5D transformation matrix
-
Matrix4d
get_frame_to_grid() const¶ computes ‘frame’ to grid 2.5D transformation matrix
-
bool
same_as(GridMapData *other) const¶ returns true if both have same name and last_modified time
-
map_info_t
get_info() const¶
pilot.Incident¶
Class¶
Generic incident type, as published on platform.events for example.
External modules can publish their own incidents on topic platform.incidents.
They will be handled by PilotServer and re-published on platform.events as required.
Inherits from pilot.Event.
Fields¶
-
bool
is_active¶ If this incident is currently active, ie. not a one time event.
-
bool
is_cleared¶ If this incident was active before and is now cleared, ie. no longer active.
-
int
timeout_ms= 3000¶ Timeout in case of an active incident in [ms]. timeout_ms <= 0 disables the feature. If the incident is not re-published within the specified timeout it will be automatically cleared by PilotServer.
pilot.JoyData¶
Fields¶
-
vector<float>
axes¶ List of joystick axis and their position from -1 to 1. Usually there are the following: [JOYAXIS_LEFT_X, JOYAXIS_LEFT_Y, JOYAXIS_LT, JOYAXIS_RIGHT_X, JOYAXIS_RIGHT_Y, JOYAXIS_RT, JOYAXIS_MAX]
List of joystick buttons and their state. Usually there are the following: [JOYBUTTON_A, JOYBUTTON_B, JOYBUTTON_X, JOYBUTTON_Y, JOYBUTTON_LB, JOYBUTTON_RB, JOYBUTTON_BACK, JOYBUTTON_START, JOYBUTTON_MAX]
pilot.LaserPointCloud¶
Class¶
LaserPointCloud contains additional information for laser point clouds.
Inherits from pilot.PointCloud2D.
pilot.LocalPlannerState¶
Class¶
LocalPlannerState represents the current state of the LocalPlanner.
Inherits from pilot.Sample.
Fields¶
-
Hash64
job¶ Unique id of the current job / goal.
-
long
path_time¶ POSIX timestamp of the current path in [usec].
-
double
path_length¶ Total path length in [meters].
-
PathPoint2D *
point¶ Current path point if any (ie. closest to current position).
-
PathPoint2D *
goal¶ Current goal point, ie. last point in current path.
-
goal_options_t
goal_options¶ Current goal options.
-
Vector2d
pos_error¶ Current (x, y) position error in [meters].
-
double
yaw_error¶ Current yaw orientation error in [radians].
-
float
update_rate¶ Current control update rate in [1/s].
-
local_planner_state_e
state¶ Current local planner state, see pilot.local_planner_state_e.
-
limit_reason_e
velocity_reason¶ Current reason for velocity limitation, see pilot.limit_reason_e.
-
limit_reason_e
yawrate_reason¶ Current reason for yawrate limitation, see pilot.limit_reason_e.
-
float
time_stuck¶ How long the platform has already been stuck in [seconds], in case
state == STUCK.
-
float
progress¶ Relative progress, from 0 to 1. Ratio of traversed path distance vs. total path length.
-
bool
is_backwards¶ If platform is currently driving backwards.
-
bool
is_restricted¶ If platform is currently restricted from turning around.
-
vector<int>
path_history¶ Sliding window history of traversed path element ids, newest at the end. See pilot.MapElement. Usually contains at least the last 10 elements.
pilot.LocalizationStatus¶
Class¶
LocalizationStatus contains information about the current state of localization.
Inherits from pilot.Sample.
Fields¶
-
localization_mode_e
mode¶ Current localization mode, see pilot.localization_mode_e.
-
set<string>
sensors¶ Current list of sensors used for localization.
-
float
update_rate¶ Current update rate in [1/s]
-
int
num_points¶ Number of valid sensor points, excluding reflectors.
-
int
num_points_total¶ Number of valid sensor points, including reflector points.
-
Vector3f
std_dev¶ Current particle spread standard deviation (x, y, yaw) [m, m, rad]. See math.Vector3f.
-
float
score¶ Current scan matching score, ie. average likelihood. More is better, maximum is 1.0 (ie. all scan points are matching exactly to the Grid Map).
pilot.MapMatch¶
Class¶
MapMatch describes the current position in terms of the Road Map, when possible.
Inherits from pilot.Sample.
Fields¶
-
bool
is_valid¶ If a match was found or not.
-
float
distance¶ Shortest distance from platform center to matched node or segment in [meters].
-
MapNode *
node¶ The matched pilot.MapNode if near a node.
-
RoadSegment *
segment¶ The matched pilot.RoadSegment if on a segment, which is normally the case.
pilot.MapNode¶
MapNode describes a node in a Road Map. It has a position as well as an optional name, in addition to some parameters.
Inherits from pilot.MapElement.
Fields¶
-
int
parent= -1¶ Parent node id, if any. If a pilot.MapNode or pilot.MapStation has a parent its position (and orientation) is defined relative to it.
-
string
name¶ Optional node name, usually a station name.
-
Vector2d
position¶ 2D (x, y) map position, see math.Vector2d.
-
Vector3d
offset¶ 3D (x, y, yaw) pose offset relative to parent, see math.Vector3d. If parent is a pilot.MapStation the offset is relative to its orientation.
-
set<drive_flags_e>
drive_flags¶ A set of drive flags for this node, see pilot.drive_flags_e.
pilot.MapProfile¶
Class¶
MapProfile represents a set of parameters which can be applied to multiple map elements at once.
Fields¶
-
string
name¶ Profile name, should be unique.
-
string
description¶ Profile description text.
-
Object
node¶ A set of pilot.MapNode parameters. See vnx.Object.
-
Object
segment¶ A set of pilot.RoadSegment parameters. See vnx.Object.
-
Object
station¶ A set of pilot.MapStation parameters. See vnx.Object.
pilot.MapStation¶
Class¶
MapStation describes a station in a Road Map, something which can be set as a goal. It has a position as well as an orientation, in addition to some parameters.
Inherits from pilot.MapNode.
Fields¶
-
float
orientation¶ Absolute map goal orientation in [radians].
-
float_param_t
goal_tune_time¶ Additional time for fine tuning position in [seconds]. See pilot.float_param_t.
-
vector_3f_param_t
goal_tolerance¶ Maximum goal position error (x, y, yaw) [m, m, rad], see pilot.vector_3f_param_t.
pilot.OccupancyMapData¶
Fields¶
-
static const uchar
FREE= 0¶
-
static const uchar
DYNAMIC= 253¶
-
static const uchar
PROHIBITED= 254¶
-
static const uchar
UNKNOWN= 255¶
-
Image8
occupancy¶ Represents the pixel grid.
- 0 to 100 = wall
- 101 to 200 = reflector
- 254 = prohibited
- 255 = unknown
Methods¶
-
Image8
to_mono_image() const¶ convert to 8-bit format (0 to 255)
-
Image8
to_rgba_image(int alpha) const¶ for visualization
-
ImageF32
to_float(float special, bool combined) const¶ convert to float format (0 to 1)
-
OccupancyMapData *
to_reflector_map() const¶ convert to reflector occupancy (shift 200 to 100, erase 0 to 100)
-
OccupancyMapData *
to_combined_map() const¶ convert reflectors to normal occupancy (map 200 to 100)
-
static Vector4uc
to_rgba(int value, int alpha)¶ convert occupancy to RGBA
pilot.Odometry¶
Class¶
Odometry contains information about the platform’s odometry, as well as velocities. See also Coordinate Systems.
Inherits from basic.Transform3D.
pilot.Path2D¶
Class¶
Path2D represents a 2D path made of individual pilot.PathPoint2D points, in a given coordinate system.
Inherits from pilot.Sample.
Fields¶
-
Hash64
job¶ Unique job id for this path / goal.
-
vector<PathPoint2D *>
points¶ List of path points, see pilot.PathPoint2D.
pilot.PathPoint2D¶
Class¶
PathPoint2D represents a point on a path to navigate. They are usually generated from a Road Map and then optimized while driving. It can also be a final goal position.
Inherits from pilot.Pose2D.
Fields¶
-
int
map_id= -1¶ Id of the map element in the Road Map, if any.
-
drive_mode_e
drive_mode= DEFAULT¶ Specifies how the robot should navigate, see pilot.drive_mode_e.
-
set<drive_flags_e>
drive_flags¶ A set of drive flags for this path point, see pilot.drive_flags_e.
-
float_param_t
orientation¶ Yaw angle offset relative to
pose.z()(holonomic only) in [radians]. See pilot.float_param_t.
-
float_param_t
max_velocity¶ Maximum velocity in [m/s]. See pilot.float_param_t.
-
float_param_t
max_yawrate¶ Maximum yawrate in [rad/s]. See pilot.float_param_t.
-
float_param_t
goal_tune_time¶ Additional time for fine tuning position in [seconds]. See pilot.float_param_t.
-
vector_3f_param_t
tolerance¶ Maximum position error (x, y, yaw) [m, m, rad], see pilot.vector_3f_param_t.
-
bool
is_restricted¶ True if a 360 degree rotation is not possible at this location.
pilot.PilotState¶
Class¶
PilotState contains information about the current state of the robot.
Fields¶
-
long
time¶ POSIX timestamp in [usec]
-
pilot_mode_e
pilot_mode¶ Current pilot mode, see pilot.pilot_mode_e.
-
motion_mode_e
motion_mode¶ Current motion mode, see pilot.motion_mode_e.
-
LocalPlannerState *
planner¶ Current local planner state, see pilot.LocalPlannerState.
-
LocalizationStatus *
localization¶ Current localization status, see pilot.LocalizationStatus.
-
ExecutionState *
execution¶ Current task execution status, see pilot.ExecutionState.
-
bool
is_recording¶ If data recording is currently active, see topic
vnx.recorder_status.
pilot.PlatformInfo¶
Class¶
PlatformInfo contains static information about the robot.
Fields¶
-
platform_type_e
type¶ Type of the platform, see pilot.platform_type_e.
-
string
name¶ Name of the robot.
-
string
serial¶ Serial number of the robot.
-
long
date_of_manufacture¶ POSIX timestamp regarding the date of manufacture of the robot in [seconds].
-
vector<string>
features¶ List of special features that the platform has.
pilot.PointCloud2D¶
Class¶
PointCloud2D contains a cloud of 2D points, usually laser points. See also pilot.LaserPointCloud.
Inherits from pilot.Sample.
Fields¶
-
string
sensor¶ Original sensor coordinate frame. (also name of sensor)
-
sensor_2d_range_t
field¶ Field of view of the sensor, relative to its own coordinate system, see pilot.sensor_2d_range_t.
-
Transform3D *
base_to_odom¶ Transformation from
base_linktoodomframe at the time of this scan.
-
Transform3D *
sensor_to_base¶ Transformation from
sensortobase_linkframe.
-
vector<Vector2d>
points¶ List of 2D (x, y) points [meters], in
framecoordinates, see pilot.Sample.
pilot.Pose2D¶
Class¶
Pose2D represents a 2D pose (x, y, yaw) in the specified coordinate system.
Inherits from basic.Transform3D.
Fields¶
-
Vector3d
pose¶ 2D pose (x, y, yaw) [m, m, rad], see math.Vector3d.
-
Matrix3f
covariance¶ Optional pose covariance matrix.
pilot.PoseArray2D¶
pilot.RoadMapData¶
Fields¶
-
string
name¶ Name of the map.
-
long
last_modified¶ POSIX timestamp when the map was last modified in [usec].
-
vector<MapNode *>
nodes¶ List of map nodes, see pilot.MapNode.
-
vector<RoadSegment *>
segments¶ List of road segments, see pilot.RoadSegment.
-
map<string, MapProfile *>
profiles¶ Map of map profiles [name => profile], see pilot.MapProfile.
-
vector<MapArea *>
areas¶ List of map areas, see pilot.MapArea.
pilot.RoadSegment¶
Class¶
RoadSegment represents a connection in the Road Map from one pilot.MapNode to another.
Inherits from pilot.MapElement.
Fields¶
-
int
from_node¶ pilot.MapNode
idfrom where the segment begins.
-
int
to_node¶ pilot.MapNode
idto where the segment goes.
-
char
direction= 0¶ -1 = one way backwards, 0 = two way, 1 = one way forwards
-
drive_mode_e
drive_mode= RELAXED_PATH_FOLLOW¶ Drive mode to be used on this segment, see pilot.drive_mode_e.
-
orientation_mode_e
orientation_mode= RELATIVE_ROAD¶ Orientation mode to be used on this segment, see pilot.orientation_mode_e.
-
float_param_t
tolerance¶ Lateral tolerance in [meters], how much the path can be modified while driving (to avoid obstacles, etc). See pilot.float_param_t.
-
float_param_t
orientation¶ Orientation to drive at on this segment in [radians]. Actual orientation depends on orientation_mode. See pilot.float_param_t.
-
float_param_t
orientation_tolerance¶ Maximum deviation allowed from the target orientation on this segment in [radians]. See pilot.float_param_t.
-
float_param_t
max_velocity¶ Maximum velocity allowed on this segment in [m/s]. See pilot.float_param_t.
-
float_param_t
max_yawrate¶ Maximum yawrate allowed on this segment in [rad/s]. See pilot.float_param_t.
-
set<drive_flags_e>
drive_flags¶ A set of drive flags for this segment, see pilot.drive_flags_e.
pilot.RobotInfo¶
Class¶
Information about the overall status of a robot.
Fields¶
-
Hash64
id¶ unique robot id
-
optional<map_info_t>
grid_map¶ used grid map
-
optional<map_info_t>
road_map¶ used road map
-
optional<pose_2d_t>
map_pose¶
-
optional<Vector3f>
velocity¶ relative to base_link (x, y, yaw) [m/s, m/s, rad/s]
-
PilotState *
state¶
-
Path2D *
map_path¶
-
MapMatch *
map_match¶
-
Footprint *
footprint¶
-
PlatformInfo *
platform¶
-
SystemState *
system_status¶
-
BatteryState *
battery_state¶
-
EmergencyState *
emergency_state¶
-
vector<PointCloud2D *>
laser_scans¶ in map coordinates
pilot.Sample¶
Class¶
Sample is a base class for any type requiring a time stamp as well as a coordinate system.
Fields¶
-
long
time¶ POSIX timestamp in [usec]
-
string
frame¶ Coordinate system name, usually
map,odomorbase_link, see Coordinate Systems.
pilot.StackFrame¶
Class¶
StackFrame contains information about the context of execution of the TaskHandler.
pilot.SystemStatus¶
Class¶
SystemStatus contains information about the platform’s hardware.
Fields¶
-
float
ambient_temperature¶ Ambient temperature inside the platform in [C].
-
vector<bool>
relay_states¶ State of the power relays, usually there is 4 of them.
-
keypad_state_t
keypad_state¶ Keypad button states, if available, see pilot.keypad_state_t.
-
charging_state_e
charging_state¶ Current charging state, see pilot.charging_state_e.
-
power_system_type_e
power_system_type¶ Type of power system, see pilot.power_system_type_e.
-
vector<system_error_e>
system_errors¶ List of system errors currently active, see pilot.system_error_e.
-
bool
is_shutdown¶ If platform has been asked to shutdown now, via the key switch.
-
bool
is_initialized¶ If platform hardware is initialized.
pilot.Task¶
Class¶
Task contains information about the current task being executed by the TaskHandler.
Fields¶
-
Hash64
id¶ Unique task id, randomly generated. See vnx.Hash64.
-
string
module¶ Module name which is handling the task, empty if handled internally.
-
string
method¶ Method name of the task being executed.
-
Object
args¶ Parameters for the task being executed. See vnx.Object.
pilot.VelocityCmd¶
Class¶
VelocityCmd contains the current commanded platform velocity. Usually only X / Y velocity and yawrate are specified.
Inherits from pilot.Sample.
Fields¶
-
Vector3f
linear¶ 3D (x, y, z) translational velocity in [m/s].
-
Vector3f
angular¶ 3D (roll, pitch, yaw) angular velocity in [rad/s].
-
bool
allow_wheel_reset= true¶ If to allow automatic wheel resetting of an MPO-700.
-
bool
reset_wheels= false¶ If to reset the wheels of an MPO-700 to their home position, when not moving.
pilot.VelocityLimits¶
Class¶
VelocityLimits defines different limits and thresholds regarding platform velocity.
Fields¶
-
float
max_vel_x¶ Maximum forward velocity (positive) [m/s]
-
float
min_vel_x¶ Maximum backwards velocity (negative) [m/s]
-
float
max_vel_y¶ Maximum lateral velocity (positive) [m/s]
-
float
max_trans_vel¶ Maximum translational velocity in any direction (positive) [m/s]
-
float
min_trans_vel¶ Minimum translational velocity (positive) [m/s]
-
float
max_rot_vel¶ Maximum absolute yawrate (positive) [rad/s]
-
float
min_rot_vel¶ Minimum absolute yawrate (positive) [rad/s]
-
float
trans_stopped_vel¶ Threshold for deciding when platform is stopped based on translational velocity (positive) [m/s]
-
float
rot_stopped_vel¶ Threshold for deciding when platform is stopped based on rotational velocity (positive) [rad/s]
pilot.area_property_e¶
pilot.battery_code_e¶
pilot.battery_type_e¶
pilot.charging_state_e¶
pilot.drive_flags_e¶
Enumeration¶
Flags that modifiy robot navigation or behavior.
-
enumerator
FIXED_ORIENTATION¶ Flag to disable orientation optimization / modification (holonomic only). Will keep orientation from Road Map, even when the path itself is changed. Used to keep a specific orientation while moving.
-
enumerator
IGNORE_FOOTPRINT¶ Flag to disable collision avoidance, use with care. Used to dock with external components where obstacles can be very close to the robot (inside footprint).
-
enumerator
DISABLE_ROTATION¶ Disable rotation of the robot (forced zero control yawrate). Will prevent robot from rotating while moving, or rotating in place. Used to dock with external components where rotation would lead to damage of the robot or components. If rotation is necessary to reach the goal, a failure will be issued.
-
enumerator
BACKWARD_OVERRIDE¶ Allows driving backwards even when normally prohibited. Used in special cases where unsafe backwards driving is necessary.
-
enumerator
OMNI_DIRECTIONAL¶ Allows driving with arbitrary orientation by default (holonomic only). Will permit infinite yaw lookahead, such as to minimize total yaw motion. If not set, a platform will usually align with orientation of the road.
-
enumerator
DISABLE_WHEEL_RESET¶ Disables automatic wheel resetting of the MPO-700. Used to increase positioning accuracy at certain stations.
-
enumerator
RESET_WHEELS¶ Will reset the wheels of an MPO-700 at the (goal) station to their home positions.
pilot.drive_mode_e¶
Enumeration¶
Specifies how the robot should navigate.
-
enumerator
STRICT_PATH_FOLLOW¶ Follows a given path exactly, without trying to optimize it. If there is an obstacle the robot will wait.
-
enumerator
RELAXED_PATH_FOLLOW¶ The given path is optimized while driving. Obstacles may be avoided, corners are cut.
-
enumerator
FREE_PATH_FOLLOW¶ Same as
RELAXED_PATH_FOLLOWexcept that in case of a blockage the robot is allowed to generate a new path by itself.
-
enumerator
FREE_ROAMING¶ Will ignore the geometry of the path segment(s) and use the GlobalPlanner to create an actual path to follow.
-
enumerator
DEFAULT¶ One of the above, depending on robot configuration, usually
RELAXED_PATH_FOLLOW.
pilot.em_stop_state_e¶
Enumeration¶
Different states of the Emergency Stop system.
-
enumerator
FREE¶ Emergency Stop is not engaged, platform is free to move.
-
enumerator
STOPPED¶ Emergency Stop is engaged, platform is prevented from moving.
-
enumerator
CONFIRMED¶ Emergency Stop has been released manually, will go to
FREEshortly.
pilot.event_code_e¶
pilot.event_t¶
Struct¶
event_t describes an event, without an attached timestamp.
The fields module, code_type and code uniquely define a specific event type that can occur.
Fields¶
-
event_type_e
type¶ Event type, see pilot.event_type_e.
-
string
module¶ Module name that generated the event.
-
string
code_type¶ Type name for the
codefield, usually the enum type name. For example:pilot.safety_code_e.
-
string
code¶ Event code, usually an enum value. For example:
EMERGENCY_STOP.
pilot.event_type_e¶
Enumeration¶
Describes the type of a pilot.event_t.
-
enumerator
ERROR¶
-
enumerator
WARNING¶
-
enumerator
NOTIFICATION¶
pilot.execution_state_e¶
pilot.float_param_t¶
Struct¶
float_param_t represents a float value with additional semantic information.
It can always be specified as just a float value, in which case type will be set to CUSTOM.
Fields¶
-
param_type_e
type¶ Semantic type information, see pilot.param_type_e.
-
float
value¶ The actual value, depending on
typeit may not be used.
pilot.goal_options_t¶
Struct¶
A set of options to modify how a goal is to be reached.
Fields¶
-
optional<float>
max_velocity¶ Global velocity limit in [m/s], optional.
-
optional<float>
max_time_stuck¶ How long to wait until aborting goal when stuck in [seconds] (default = infinite)
-
optional<drive_mode_e>
drive_mode¶ Custom drive mode for the entire path, see pilot.drive_mode_e.
-
set<drive_flags_e>
drive_flags¶ Set of additional drive flags for final goal position. See pilot.drive_flags_e.
pilot.keypad_state_t¶
Struct¶
An object of this type represents the current state of the keypad.
For each button there is a boolean member which is true when the button is pressed and false when it is not.
pilot.limit_reason_e¶
Enumeration¶
Possible reasons for limiting velocity or yawrate.
-
enumerator
DEFAULT_MAX¶ Default maximum for the platform. (global configuration)
-
enumerator
CUSTOM_MAX¶ Custom limit (at current position). (Road Map parameter, or via. pilot.goal_options_t)
-
enumerator
ACCEL_MAX¶ Limited due to hitting maximum allowed acceleration / decceleration.
-
enumerator
LOCAL_COST¶ Limited due to obstacles in path or close to path.
-
enumerator
PATH_DEVIATION¶ Limited due to unexpected deviation from path.
-
enumerator
ORIENTATION_DEVIATION¶ Limited due to unexpected deviation from target orientation.
-
enumerator
CURVE_LIMIT¶ Limited due to maximum lateral acceleration.
-
enumerator
WAITING¶ Limited due to waiting for a certain condition.
-
enumerator
GOAL_MAX¶ Limited due to approaching final goal position.
-
enumerator
LIMIT_AHEAD¶ Limited due to approaching a lower limit on the path ahead.
-
enumerator
OBSTACLE¶ Limited due to obstacle blocking the path.
-
enumerator
STOPPING¶ Limited due to trying to stop.
-
enumerator
FINISHED¶ Limited due to having reached the goal.
pilot.local_planner_state_e¶
Enumeration¶
Possible states of the LocalPlanner.
-
enumerator
IDLE¶ Waiting for a job / goal.
-
enumerator
WAITING¶ Waiting to move, due to several possible reasons, for example waiting for localization to intialize.
-
enumerator
TRANSLATING¶ Moving in X / Y direction, can include rotation also.
-
enumerator
ROTATING¶ Rotating in place, without X / Y movement.
-
enumerator
ADJUSTING¶ Rotating in place while making small adjustments in X / Y position. For differential kinematics only.
-
enumerator
TURNING¶ Rotating in place to turn around. For differential kinematics only.
-
enumerator
STUCK¶ Unable to continue for now, due to obstacles in the path.
-
enumerator
FINISHED¶ Current goal has been reached, waiting for new job / goal.
-
enumerator
CANCELED¶ Current goal has been canceled, stopping now.
-
enumerator
LOST¶ Current position could not be matched to the given path, requesting new path.
pilot.localization_mode_e¶
Enumeration¶
Possible modes of localization.
-
enumerator
NONE¶ No localization running.
-
enumerator
NO_MAP¶ No Grid Map available.
-
enumerator
NO_INPUT¶ No sensor input available.
-
enumerator
NO_ODOMETRY¶ No odometry available.
-
enumerator
LOST¶ Unable to localize, position most likely wrong.
-
enumerator
INITIALIZING¶ Performing initial localization, waiting for confidence to increase.
-
enumerator
DEAD_RECKONING¶ Unable to localize at current position, extrapolating based on odometry.
-
enumerator
MODE_1D¶ Partial localization in one direction, DEAD_RECKONING otherwise.
-
enumerator
MODE_1D_YAW¶ Partial localization in one direction plus orientation, DEAD_RECKONING otherwise.
-
enumerator
MODE_2D¶ Partial localization in X and Y direction, DEAD_RECKONING for orientation.
-
enumerator
MODE_2D_YAW¶ Full localization in X and Y direction as well as orientation.
pilot.motion_mode_e¶
Enumeration¶
A set of motion modes of the robot, defining who is contolling the motion.
-
enumerator
NONE¶ No motion is possible in this mode.
-
enumerator
CUSTOM¶ Custom motion commands on topic
platform.velocity_cmdcontrol the robot.
-
enumerator
JOYSTICK¶ Motion commands from a connected joystick control the robot.
-
enumerator
AUTOMATIC¶ The LocalPlanner is controlling the robot, usually following a path generated by the HybridPlanner.
pilot.orientation_mode_e¶
Enumeration¶
Different modes affecting the orientation of the platform.
-
enumerator
RELATIVE_ROAD¶ Specified orientation is relative to the pilot.RoadSegment.
-
enumerator
ABSOLUTE_MAP¶ Specified orientation is an absolute map orientation (ie. relative to the
mapcoordinate system).
pilot.param_type_e¶
Enumeration¶
Semantic type of a parameter.
-
enumerator
DEFAULT¶ The default value should be used.
-
enumerator
CUSTOM¶ The custom value that is provided should be used.
-
enumerator
OPTIMIZED¶ Similar to CUSTOM, means the value was optimized internally instead of specified by a user.
-
enumerator
DISABLED¶ The feature corresponding to the parameter should be disabled.
-
enumerator
IGNORE¶ The parameter should be ignored.
pilot.permission_e¶
Enumeration¶
Permissions that can be given to certain users. See also vnx.permission_e.
-
enumerator
MOVE¶ Permission to move robot.
-
enumerator
CHARGE¶ Permission to charge robot.
-
enumerator
INITIALIZE¶ Permission to initialize localization.
-
enumerator
RECORD_DATA¶ Permission to start a data recording.
-
enumerator
REMOTE_CONTROL¶ Permission to control robot remotely.
-
enumerator
RELAY_CONTROL¶ Permission to switch relays.
-
enumerator
DISPLAY_CONTROL¶ Permission to display text on the LCD.
-
enumerator
CHANGE_GRIDMAP¶ Permission to change the active Grid Map.
-
enumerator
CHANGE_ROADMAP¶ Permission to change the active Road Map.
-
enumerator
UPLOAD_SCRIPT¶ Permission to upload / overwrite scripts.
-
enumerator
EXECUTE_SCRIPT¶ Permission to execute scripts.
-
enumerator
INTERVENE_SCRIPT¶ Permission to pause / resume scripts.
pilot.pilot_mode_e¶
Enumeration¶
A set of operating modes of the robot.
-
enumerator
MAPPING¶ Creation of a new map or updating of an existing map.
-
enumerator
NAVIGATION¶ Normal navigation mode, using localization with an existing map.
-
enumerator
TELEOP¶ Basic operation mode, without localization and path planning.
-
enumerator
REPLAY¶ Special simulation mode to recompute dynamic data based on recorded sensor data, for visualization purposes.
pilot.platform_type_e¶
Enumeration¶
Available platform types.
-
enumerator
MP_400¶ Neobotix MP-400, see https://www.neobotix-roboter.de/produkte/mobile-roboter/mobiler-roboter-mp-400.
-
enumerator
MP_500¶ Neobotix MP-500, see https://www.neobotix-roboter.de/produkte/mobile-roboter/mobiler-roboter-mp-500.
-
enumerator
MPO_500¶ Neobotix MPO-500, see https://www.neobotix-roboter.de/produkte/mobile-roboter/mobiler-roboter-mpo-500.
-
enumerator
MPO_700¶ Neobotix MPO-700, see https://www.neobotix-roboter.de/produkte/mobile-roboter/mobiler-roboter-mpo-700.
pilot.polygon_t¶
Struct¶
polygon_t describes a geometric polygon in a certain frame of reference.
Fields¶
-
string
frame¶ Coordinate system name, for example
base_link.
-
vector<Vector2d>
points¶ List of points forming the polygon, see math.Vector2d. The order of points does not matter, clock-wise or anti-clock-wise is both supported.
pilot.power_system_type_e¶
pilot.safety_code_e¶
pilot.sensor_2d_range_t¶
Struct¶
Specifies the range in which a sensor measurement is considered valid.
pilot.system_error_e¶
pilot.vector_3f_param_t¶
Struct¶
vector_3f_param_t represents a 3D float vector with additional semantic information.
It can always be specified as just a 3D float vector, in which case the types will be set to CUSTOM.
Fields¶
-
float_param_t
x¶ X value, see pilot.float_param_t.
-
float_param_t
y¶ Y value, see pilot.float_param_t.
-
float_param_t
z¶ Z value, see pilot.float_param_t.
vnx.Hash64¶
Hash64 is a 64-bit unsigned integer, which usually represents a CRC64 hash of a string, or sometimes simply a random number.
The specific hash function used is CRC-64/XZ (alias CRC-64/GO-ECMA), see also https://reveng.sourceforge.io/crc-catalogue/17plus.htm#crc.cat-bits.64.
vnx.JRPC_Error¶
Class¶
The error object that is contained in error messages returned by JSON-RPC Interface.
Fields¶
-
int
code¶ One of the following error codes:
static const int PARSE_ERROR = -32700; static const int INVALID_REQUEST = -32600; static const int METHOD_NOT_FOUND = -32601; static const int INVALID_PARAMS = -32602; static const int INTERNAL_ERROR = -32603; static const int PERMISSION_DENIED = 403; static const int EXCEPTION = 500;
-
string
message¶ A short message to indicate what went wrong.
-
Exception *
data¶ The actual exeption object as thrown on the server side.
vnx.LogMsg¶
Class¶
Represents a log message.
vnx.ModuleInfo¶
Class¶
Information about a module.
Fields¶
-
long
time¶ time stamp (virtual time) [usec]
-
Hash64
id¶ unique module id
-
Hash64
src_mac¶ source mac for publishing
-
string
name¶ module name
-
string
type¶ type name
-
long
time_started¶ POSIX timestamp [usec]
-
long
time_idle¶ current stats (see vnx_heartbeat_interval_ms) [usec]
-
long
time_running¶ current stats (see vnx_heartbeat_interval_ms) [usec]
-
long
time_idle_total¶ since start of module [usec]
-
long
time_running_total¶ since start of module [usec]
-
long
num_async_pending¶ number of pending async requests (waiting for returns)
-
long
num_async_process¶ number of async requests being processed right now
-
vector<string>
sub_topics¶ topic subscriptions
-
vector<string>
pub_topics¶ topic publishers
-
map<Hash64, Endpoint *>
remotes¶ map of connected processes (process id => endpoint)
-
TypeCode
type_code¶ module type code
vnx.Object¶
Object represents an arbitrary object which is dynamically created and does not have a type.
However an optional type name can be specified via a special field called __type.
Internally it is a map of string keys to vnx.Variant values.
JSON¶
In JSON format an object is specified as follows:
{
"__type": "optional.type.name.here",
"field": "value",
"some": 1234,
"array": [1, 2, 3, 4],
"nested": {
"example": "value",
...
},
...
}
Lua Script¶
In Lua Script an object can be created as follows:
{
field = "value",
some = 1234,
array = {1, 2, 3, 4},
nested = {
example = "value",
...
},
...
}
Native C++¶
In native C++ an object can be created as follows:
#include <vnx/vnx.h>
vnx::Object obj;
obj["field"] = "value";
obj["some"] = 1234;
obj["array"] = std::vector<int>{1, 2, 3, 4};
vnx::Object nested;
nested["example"] = "value";
obj["nested"] = nested;
std::cout << obj << std::endl;
vnx.User¶
Class¶
A User object represents an entity who can authenticate in order to operate with a special set of permissions.
vnx.Variant¶
Variant represents a value of arbitrary type which is assigned dynamically.
It can be an integral (ie. int, float, …), a string, a vector<T> of values,
a set<T> of values, a map<K, V> of values or an vnx.Object, for example.
JSON¶
In JSON format a Variant could be anything, for example:
null, true, false, a number, a string, an array of values or an object.
Lua Script¶
In Lua Script a Variant is a normal Lua variable and can be anyting, for example:
nil, true, false, a number, a string, an array of values, a table or an object.
Native C++¶
In native C++ a Variant can be created / assigned as follows:
#include <vnx/vnx.h>
vnx::Variant example(1234);
std::cout << example.to<int>() << std::endl; // 1234
example = "value";
std::cout << example.to<std::string>() << std::endl; // value
example = std::vector<int>{1, 2, 3, 4};
std::cout << example << std::endl; // [1, 2, 3, 4]
vnx::Object obj;
obj["field"] = "value";
example = obj;
std::cout << example << std::endl; // {"field": "value"}
vnx.access_role_e¶
Enumeration¶
A set of default access roles and their default permissions.
See also vnx.permission_e.
-
enumerator
DEFAULT¶ Default access role, mostly used for anonymous users. Does not provide any permissions by default, but that can be changed via configuration.
-
enumerator
VIEWER¶ Read-only access role. Provides permissions: VIEW, TIME_SYNC.
-
enumerator
OBSERVER¶ Same as VIEWER, with additional permission CONST_REQUEST.
-
enumerator
USER¶ Same as OBSERVER, with additional permission READ_CONFIG.
-
enumerator
INSTALLER¶ Same as USER, with additional permissions: PUBLISH, WRITE_CONFIG, START, STOP, RESTART, SHUTDOWN, SELF_TEST.
-
enumerator
ADMIN¶ Same as INSTALLER, with additional permissions: REQUEST, PROTECTED_CONFIG, PROXY_IMPORT, PROXY_EXPORT, PROXY_FORWARD, HOST_SHUTDOWN, LOCAL.
vnx.permission_e¶
Enumeration¶
Generic permissions that can be given to certain users.
-
enumerator
VIEW¶ Permission to subscribe to topics (and access process statistics).
-
enumerator
CONST_REQUEST¶ Permission to execute const methods that do not explicitly set a permission.
-
enumerator
PUBLISH¶ Permission to publish samples.
-
enumerator
REQUEST¶ Permission to execute all methods that do not explicitly set a permission.
-
enumerator
READ_CONFIG¶ Permission to read config values.
-
enumerator
WRITE_CONFIG¶ Permission to change config values.
-
enumerator
PROTECTED_CONFIG¶ Permission to read/write protected config values (like user passwords etc).
-
enumerator
START¶ Permission to start new modules.
-
enumerator
STOP¶ Permission to stop a running module.
-
enumerator
RESTART¶ Permission to restart a module.
-
enumerator
SHUTDOWN¶ Permission to shutdown the process.
-
enumerator
HOST_SHUTDOWN¶ Permission to shutdown the host machine.
-
enumerator
SELF_TEST¶ Permission to execute self tests.
vnx.opc_ua.security_mode_e¶
vnx.opc_ua.security_policy_e¶
Enumeration¶
The security policy of an endpoint provided by the vnx.opc_ua.Server.
-
enumerator
NONE¶ No security, no encryption. Can be used without a private key and even without a certificate
-
enumerator
BASIC_128_RSA_15¶ (Deprecated!)
-
enumerator
BASIC_256¶ (Deprecated!)
-
enumerator
BASIC_256_SHA_256¶
-
enumerator
AES_128_SHA_256_RSA_OAEP¶
Modules¶
GlobalPlanner¶
Module¶
The GlobalPlanner module supports path planning based on a global cost map, which is generated from a Grid Map. The module uses an A* style path finding algorithm.
Most functions require permission pilot.permission_e.MOVE, see pilot.permission_e.
Functions¶
goal_options_t options- Optional goal options, see pilot.goal_options_t. If not specified will use default values.
Hash64 job- Optional job id, to identify the new goal. If not specified (or set to zero) will generate a new random id. See vnx.Hash64.
The following functions set / append a new goal while returing immediately.
-
void
set_goal(PathPoint2D goal, goal_options_t options, Hash64 job)¶ Sets a new goal using the provided pose and parameters in
goal. Any pending goals are canceled beforehand. See pilot.PathPoint2D. Requires permissionMOVE.
The following functions return when the new goal is physically reached, or the goal was canceled.
-
void
move_to(PathPoint2D goal, goal_options_t options, Hash64 job)¶ Same as
set_goal(...)but will block until goal is reached or canceled. See pilot.PathPoint2D. Requires permissionMOVE.
HttpProxy¶
Module¶
The HttpProxy module provides a HTTP REST API, see HTTP Interface.
Most functions require a special permission, see vnx.permission_e.
Functions¶
-
void
publish(Object sample, string topic)¶ Will publish a given
sampleon the specifiedtopic. Requires permissionPUBLISH. See vnx.Object.
-
Object
multi_request(map<string, string> paths) const¶ Performs multiple
/api/HTTP requests in one.pathsis a map from paths to output names, for example:[["/topic/...", "topic1"], ...]The result will be a vnx.Object containing the individual results, for example:
{"topic1": {...}, ...}
HybridPlanner¶
Module¶
The HybridPlanner module supports a combined path planning by taking into account a Road Map as well as a Grid Map. It automatically chooses to drive on the Road Map when possible, only to fall back to Grid Map based navigation if needed. As such it supports different ways to specify a goal, either by station name, by providing a modified station structure or by specifying an arbitrary pose.
Multiple goals can be specified, in which case the goals are traversed one after the other, without waiting or stopping at intermediate goals.
Most functions require permission pilot.permission_e.MOVE, see pilot.permission_e.
Functions¶
goal_options_t options- Optional goal options, see pilot.goal_options_t. If not specified will use default values.
Hash64 job- Optional job id, to identify the new goal. If not specified (or set to zero) will generate a new random id. See vnx.Hash64.
The following functions set / append a new goal while returning immediately.
If there is already a goal in progress, the set_* functions cancel it before
setting the new goal (the call blocks until the robot stops) while the append_*
functions append the new goal after the end of the path.
-
void
set_goal(MapStation goal, goal_options_t options, Hash64 job)¶ Sets a new goal using the provided pose and parameters in
goal. Any pending goals are canceled beforehand. See pilot.MapStation. Requires permissionMOVE.
-
void
set_goal_station(string name, goal_options_t options, Hash64 job)¶ Sets a new goal using the provided station
name. Any pending goals are canceled beforehand. The station must exist in the current Road Map. Requires permissionMOVE.
-
void
set_goal_position(PathPoint2D goal, goal_options_t options, Hash64 job)¶ Sets a new goal using the provided pose and parameters in
goal. Similar toset_goal(). Any pending goals are canceled beforehand. See pilot.PathPoint2D. Requires permissionMOVE.
-
void
append_goal(MapStation goal, goal_options_t options, Hash64 job)¶ Same as
set_goal(...)but will not cancel active or pending goals. See pilot.MapStation. Requires permissionMOVE.
-
void
append_goal_station(string name, goal_options_t options, Hash64 job)¶ Same as
set_goal_station(...)but will not cancel active or pending goals. Requires permissionMOVE.
-
void
append_goal_position(PathPoint2D goal, goal_options_t options, Hash64 job)¶ Same as
set_goal_position(...)but will not cancel active or pending goals. See pilot.PathPoint2D. Requires permissionMOVE.
The following functions return when the new goal is physically reached, or the goal was canceled.
-
void
move_to(MapStation goal, goal_options_t options, Hash64 job)¶ Same as
set_goal(...)but will block until goal is reached or canceled. See pilot.MapStation. Requires permissionMOVE.
-
void
move_to_station(string name, goal_options_t options, Hash64 job)¶ Same as
set_goal_station(...)but will block until goal is reached or canceled. Requires permissionMOVE.
-
void
move_to_position(PathPoint2D goal, goal_options_t options, Hash64 job)¶ Same as
set_goal_position(...)but will block until goal is reached or canceled. See pilot.PathPoint2D. Requires permissionMOVE.
The following functions set / append a list of new goals while returning immediately.
If there is already a goal in progress, the set_* functions cancel it before
setting the new goal (the call blocks until the robot stops) while the append_*
functions append the new goals after the end of the path.
-
void
set_goals(vector<MapStation> goals, goal_options_t options, Hash64 job)¶ Sets a list of new goals, similar to
set_goal(...). See pilot.MapStation. Requires permissionMOVE.
-
void
set_goal_stations(vector<string> names, goal_options_t options, Hash64 job)¶ Sets a list of new goals, similar to
set_goal_station(...). The stations must exist in the current Road Map. Requires permissionMOVE.
-
void
set_goal_positions(vector<PathPoint2D> goals, goal_options_t options, Hash64 job)¶ Sets a list of new goals, similar to
set_goal_position(...). See pilot.PathPoint2D. Requires permissionMOVE.
-
void
append_goals(vector<MapStation> goals, goal_options_t options, Hash64 job)¶ Appends a list of new goals, similar to
append_goal(...). See pilot.MapStation. Requires permissionMOVE.
-
void
append_goal_stations(vector<string> names, goal_options_t options, Hash64 job)¶ Appends a list of new goals, similar to
append_goal_station(...). Requires permissionMOVE.
-
void
append_goal_positions(vector<PathPoint2D> goals, goal_options_t options, Hash64 job)¶ Appends a list of new goals, similar to
append_goal_position(...). See pilot.PathPoint2D. Requires permissionMOVE.
The following functions return when the last goal specified has been physically reached, or the goals were canceled.
-
void
move_tos(vector<MapStation> goals, goal_options_t options, Hash64 job)¶ Same as
set_goals(...)but will block until last goal is reached or canceled. See pilot.MapStation. Requires permissionMOVE.
-
void
move_to_stations(vector<string> names, goal_options_t options, Hash64 job)¶ Same as
set_goal_stations(...)but will block until last goal is reached or canceled. Requires permissionMOVE.
-
void
move_to_positions(vector<PathPoint2D> goals, goal_options_t options, Hash64 job)¶ Same as
set_goal_positions(...)but will block until last goal is reached or canceled. See pilot.PathPoint2D. Requires permissionMOVE.
LocalPlanner¶
Module¶
The LocalPlanner module generates velocity commands to keep the robot on a given path or to reach a certain goal which is in reach. Usually the given path is generated by the HybridPlanner and depending on configuration further optimized by the LocalPlanner.
Most functions require a special permission, see pilot.permission_e.
Functions¶
goal_options_t options- Optional goal options, see pilot.goal_options_t. If not specified will use default values.
Hash64 job- Optional job id, to identify the new goal. If not specified (or set to zero) will generate a new random id. See vnx.Hash64.
-
Path2D *
get_path() const¶ Returns the current original map path being followed, if any. See pilot.Path2D.
-
Path2D *
get_optimized_path() const¶ Returns the current optimized map path being followed, if any. See pilot.Path2D.
-
LocalPlannerState
get_state() const¶ Returns the current planner state. See pilot.LocalPlannerState.
-
void
pause(bool em_stop)¶ Will pause movement, similar to an EM stop, but with a soft decceleration. However, if
em_stopis set to true will perform an emergency stop. resume() needs to be called to continue with the current or any new goal.
-
void
resume()¶ Will resume movement after having been paused, while adhering to acceleration limits.
-
void
await_goal() const¶ Waits for the current goal to finish. If currently idle it returns immediately.
-
void
await_goal_ex(Hash64 job) const¶ Waits for a specific goal to finish. Either the currently active or finished goal, or any in the future. If the specified goal has already been reached in the past and subsequently been superseeded by another, this function will fail, ie. it will wait forever. Ideally this function is called before setting the goal to be waited for.
-
void
cancel_goal()¶ Will cancel any pending goal and bring the robot to an immediate stop. Requires permission
MOVE.
-
void
cancel_goal_await()¶ Same as cancel_goal() and then await_goal() in one call.
-
void
set_path(Path2D *path, goal_options_t options)¶ Sets a new path to be followed and returns immediately. Any pending goal is canceled beforehand. The path needs to be in map coordinates. See pilot.Path2D. Requires permission
MOVE.
-
void
update_path(Path2D *path, goal_options_t options)¶ Updates the current path to be followed without stopping or canceling the current goal. If the new path does not include the current position (to within some tolerance) a failure will be issued. The path needs to be in map coordinates and it’s
jobid needs to match the current job id. See pilot.Path2D. Requires permissionMOVE.
-
void
follow_path(Path2D *path, goal_options_t options)¶ Same as
set_path(...)but will block until the goal is reached or canceled. See pilot.Path2D. Requires permissionMOVE.
-
void
set_goal(PathPoint2D goal, goal_options_t options, Hash64 job)¶ Sets a new goal position, either relative to the current position or an absolute map position. The new goal must be within reach, with a maximum distance depending on configuration, but usually around 1 m. See pilot.PathPoint2D. Requires permission
MOVE.
-
void
move_to(PathPoint2D goal, goal_options_t options, Hash64 job)¶ Same as
set_goal(...)but will block until the goal is reached or canceled. See pilot.PathPoint2D. Requires permissionMOVE.
PilotServer¶
Module¶
The PilotServer module is the control center of the robot, it handles switching between different modes such as mapping and navigation or automatic drive mode and teleoperation. In addition it allows to initialize the localization as well as start / stop a data recording.
Most functions require a special permission, see pilot.permission_e.
Functions¶
-
PilotState
get_state() const¶ Returns the current pilot state, see pilot.PilotState.
-
PlatformInfo
get_platform_info() const¶ Returns platform info, see pilot.PlatformInfo.
-
void
set_pose_estimate(Vector3d pose, long time)¶ Initializes the localization by providing a
poseestimate (x, y, yaw) [m, m, rad] in map coordinates. Optionally atimestamp can be provided in [usec]. See math.Vector3d. Requires permissionINITIALIZE.
-
void
switch_pilot_mode(pilot_mode_e new_mode, Object config, bool keep_motion_mode = false)¶ Switches the current pilot mode to
new_mode. Platform has to be stationary. Optionally a user config can be provided withconfig, overriding default values. Ifkeep_motion_modeis set to true, the current motion mode will not be changed automatically. See pilot.pilot_mode_e and vnx.Object. Requires permissionREMOTE_CONTROL.
-
void
switch_motion_mode(motion_mode_e new_mode)¶ Switches the current motion mode to
new_mode. Platform has to be stationary. See pilot.motion_mode_e. Requires permissionREMOTE_CONTROL.
-
void
switch_footprint(Footprint footprint)¶ Sets a new footprint to use. Platform has to be stationary. See pilot.Footprint. Requires permission
REMOTE_CONTROL.
-
void
start_recording(string file_name)¶ Starts a new data recording using the optional file name
file_name. The recording will end up in the~/pilot/user/data/folder. Iffile_nameis empty a default name will be chosen. In any case a timestamp will be appended to the file name to make it unique. Requires permissionRECORD_DATA.
-
void
stop_recording()¶ Stops the current data recording process. Requires permission
RECORD_DATA.
PlatformInterface¶
Interface¶
The PlatformInterface is an interface to the hardware abstraction module running on a platform. It allows access to hardware features such as digital inputs / outputs, analog inputs, power relays and the LCD.
Most functions require a special permission, see pilot.permission_e.
Functions¶
-
void
charge()¶ Attempts to charge the platform’s batteries when connected to a charging station. Will return upon completion of charging process. In case of an error (such as no contact to the charging station) an exception will be thrown. Requires permission
CHARGE.
-
void
start_charging()¶ Attempts to start the charging process at a charging station. Returns immediately in case of success, or throws an exception. Requires permission
CHARGE.
-
void
stop_charging()¶ Stops the charging process at a charging station. Returns immediately in case of success, or throws an exception. Requires permission
CHARGE.
-
void
set_relay(int channel, bool state)¶ Switch a relay on or off, depending on
state.channelis an index from 0 to 3 (in most cases) denoting the relay to switch. Requires permissionRELAY_CONTROL.
-
void
set_digital_output(int channel, bool state)¶ Switches a digital output to the specified
state.channelis an index from 0 to 15 (in most cases) denoting the output pin. Requires permissionRELAY_CONTROLas well as an installed IOBoard.
-
void
set_display_text(string line)¶ Sets the first line on the LCD to the given text, for the next 30 seconds. Requires permission
DISPLAY_CONTROL.
-
void
wait_for_digital_input(int channel, bool state)¶ Waits for a digitial input to reach the specified
state. If it’s already reached will return immediately.channelis an index from 0 to 15 (in most cases) denoting the input pin. Requires permissionCONST_REQUESTas well as an installed IOBoard.
-
void
shutdown()¶ Will terminate the process, shutdown the machine and turn off the platform. Cannot be undone except by turning on the platform by hand again. Requires permission
SHUTDOWN_HOST, see vnx.permission_e.
RoadMapPlanner¶
Module¶
The RoadMapPlanner module provides navigation support based on a Road Map.
Most functions require a special permission, see pilot.permission_e.
Functions¶
goal_options_t options- Optional goal options, see pilot.goal_options_t. If not specified will use default values.
Hash64 job- Optional job id, to identify the new goal. If not specified (or set to zero) will generate a new random id. See vnx.Hash64.
-
RoadMapData *
get_road_map() const¶ Returns the currently used Road Map, if any. See pilot.RoadMapData.
-
MapStation *
find_station(string name) const¶ Returns the corresponding map station by that name, if any. See pilot.MapStation.
-
void
set_goal_station(string name, goal_options_t options, Hash64 job)¶ Sets a new goal using the provided station
nameand returns immediately. Any pending goals are canceled beforehand. The station must exist in the current Road Map. Requires permissionMOVE.
-
void
move_to_station(string name, goal_options_t options, Hash64 job)¶ Same as
set_goal_station(...)but will block until goal is reached or canceled. Requires permissionMOVE.
TaskHandler¶
Module¶
The TaskHandler module allows the execution of a sequence of tasks, specified by a Lua script, which can either be written by hand or generated by using the graphical programming interface TaskEditor.
See Lua Script for more information on how to write a script by hand.
Most functions require a special permission, see pilot.permission_e.
Functions¶
Hash64 jobid- Optional job id, to identify a new program execution. If not specified (or set to zero) will generate a new random id. See vnx.Hash64.
The following functions will cancel any running program beforehand, start to execute the new program and return immediately.
-
void
execute_file(string filename, vector<Variant> params, Hash64 jobid)¶ Starts to execute the specified Lua script file, i.e. executes its main function with the given parameters. The
filenameis relative to the pilot home folder, e.g.~/pilot/. Requires permissionEXECUTE_SCRIPT.
-
void
execute_program(string program, vector<Variant> params, Hash64 jobid)¶ Starts to execute the given Lua script code, i.e. executes its main function with the given parameters. Requires permission
UPLOAD_SCRIPT.
-
void
cancel_program()¶ Will cancel a running program at the next opportunity, usually after finishing the current task. Requires permission
INTERVENE_SCRIPT.
-
void
pause_program()¶ Will pause a running program at the next opportunity, usually after finishing the current task. Requires permission
INTERVENE_SCRIPT.
-
void
resume_program()¶ Will resume executing a paused program. Requires permission
INTERVENE_SCRIPT.
vnx.JRPC_Proxy¶
Module¶
The vnx.JRPC_Proxy module provides a way to connect to another vnx.JRPC_Server.
This module and the vnx.Proxy module share the same base and are largely identical in handling.
Methods¶
The module has all methods of vnx.Proxy and additionally the following ones.
-
void
select_service(string service_name)¶ For the rest of the connection, all method calls by JSON-RPC Interface that do not specify a module will be directed to
service_name.Supply an empty string or
.to reset it to the proxy module itself.
vnx.JRPC_Server¶
Module¶
The vnx.JRPC_Server module provides a JSON RPC server to interface with the running process.
On the other end a vnx.JRPC_Proxy is needed to connect with the server.
This module and the vnx.Server module share the same base and are largely identical in handling.
Options¶
Identical to vnx.Server.
vnx.Proxy¶
Module¶
The vnx.Proxy module provides a way to connect to another vnx.Server.
Options¶
-
string
address¶ URL to connect to, for example
localhost:1234(TCP/IP) or/tmp/mysocket.sockfor a UNIX socket. If no TCP port is specifed (ie.localhost) a default port of4444is used. If no IP address is specified (ie.:1234) a default oflocalhostis used.
-
vector<string>
import_list¶ List of topics to import from the sever.
-
vector<string>
export_list¶ List of topics to export to the server.
-
vector<string>
forward_list¶ List of services to forward to the server. Usually a service is a module’s name. Requests to these services are then sent to the server who will forward them to the actual modules processing them. Return messages are automatically routed back to the clients.
-
map<Hash64, string>
tunnel_map¶ Same as forward_list but with a different service address locally [local alias => remote service name]. Will forward requests on the
Hash64address to thestringservice on the server.stringservice names are converted to aHash64address internally. See vnx.Hash64.
-
map<string, string>
import_map¶ Same as
import_listbut will map to a different topic name locally. [remote name -> local name]
-
map<string, string>
export_map¶ Same as
export_listbut will map to a different topic name on the server. [local name -> remote name]
-
bool
auto_import= false¶ If to import all subscribed to topics from the server. Only used in special cases, since most of the time it leads to network loops.
-
bool
time_sync= false¶ If to syncronize local virtual time with the server. Same as importing the
vnx.time_synctopic.vnx::get_time_*()functions will then return a time which is in sync with the server.
-
bool
block_until_connect= true¶ If to block client requests until first sucessful connect.
-
bool
block_until_reconnect= false¶ If to block client requests until next sucessful reconnect, in case connection breaks down.
-
int
max_queue_ms= 100¶ Maximum queue length in [ms] for receiving data internally, 0 = unlimited. If the network is overloaded at most this amount of data (in terms of latency) will be buffered internally before starting to drop messages. This queue is in addition to the internal TCP send buffer.
-
int
max_queue_size= 1000¶ Maximum queue size in [number of messages] for receiving data internally, 0 = unlimited. Similar to max_queue_ms.
-
int
recv_buffer_size= 0¶ TCP receive buffer size (0 = default) [bytes]
-
int
send_buffer_size= 131072¶ TCP send buffer size, bigger equals more latency in case of network overload. (0 = default) [bytes]
-
string
default_access= "DEFAULT"¶ Default access level for anonymous clients, see User Management. Only if use_authentication = true, otherwise there are no restrictions, ie. full permissions to any user.
vnx.Server¶
Module¶
The vnx.Server module provides a VNX server to interface with the running process.
On the other end a vnx.Proxy is needed to connect with the server.
Options¶
-
string
address¶ URL to bind to, for example
0.0.0.0:1234(TCP/IP) or/tmp/mysocket.sockfor a UNIX socket. UNIX sockets need to have a file ending of*.sock. If no TCP port is specifed (ie.0.0.0.0) a default port of4444is used. If no IP address is specified (ie.:1234) a default oflocalhostis used.
-
bool
use_authentication= false¶ If to require user authentication (login) to gain more persmissions than
default_access. If set tofalseany user has full permissions and no login is necessary.
-
vector<string>
export_list¶ List of topics to automatically export to all clients without them asking for it. Samples published on these topics are forwarded to all clients and re-published there.
-
int
max_queue_ms= 100¶ Maximum queue length in [ms] for receiving data internally, 0 = unlimited. If the network is overloaded at most this amount of data (in terms of latency) will be buffered internally before starting to drop messages. This queue is in addition to the internal TCP send buffer.
-
int
max_queue_size= 1000¶ Maximum queue size in [number of messages] for receiving data internally, 0 = unlimited. Similar to max_queue_ms.
-
int
recv_buffer_size= 0¶ TCP receive buffer size (0 = default) [bytes]
-
int
send_buffer_size= 131072¶ TCP send buffer size, bigger equals more latency in case of network overload. (0 = default) [bytes]
-
string
default_access= "DEFAULT"¶ Default access level for anonymous clients, see User Management. Only if use_authentication = true, otherwise there are no restrictions, ie. full permissions to any user.
vnx.opc_ua.Proxy¶
Module¶
The vnx.opc_ua.Proxy module provides a OPC-UA proxy to connect to a OPC-UA server.
It allows to call methods as well as read variables on the server.
Options¶
-
string
address¶ OPC-UA server url to connect to, for example
opc.tcp://127.0.0.1:4840.
-
string
username¶ Optional user name for server login.
-
string
password¶ Password for server login, required when
usernameis set.
-
string
certificate_file= ""¶ Optional path to a client certificate file (DER format).
-
string
private_key_file= ""¶ Optional path to a client private key file (DER format).
-
string
application_uri= "urn:open62541.client.application"¶ Must match the URI in the certificate.
-
vector<string>
trust_list¶ Server certificate trust files (CRL format). This only has an effect if a client certificate is configured. If the list is empty, any certificate is accepted.
-
security_mode_e
security_mode= ANY¶ Required security for connections. See vnx.opc_ua.security_mode_e.
-
bool
block_until_connect= true¶ If to block client requests until first sucessful connect.
-
bool
block_until_reconnect= false¶ If to block client requests until next sucessful reconnect, in case connection breaks down.
Functions¶
UA node ids are provided via a pair<ushort, Variant>, where the first value is the namespace index
and the second value either an integer or a string.
In case a UA method returns more than one value the Variant return value
will contain an array of variants, ie. vector<Variant>. See also vnx.Variant.
-
Variant
call(string method, vector<Variant> args) const¶ Calls a global
methodwith the given arguments and returns the result. The implicit object for this call is UA_NS0ID_OBJECTSFOLDER. Requires permissionvnx.opc_ua.permission_e.CALL.
-
Variant
object_call(pair<ushort, Variant> object, string method, vector<Variant> args) const¶ Calls a
methodon theobjectwith the given arguments and returns the result. Requires permissionvnx.opc_ua.permission_e.CALL.
-
Variant
read_variable(pair<ushort, Variant> node) const¶ Reads the value of a given variable
node.
-
Variant
read_object_variable(pair<ushort, Variant> object, string variable) const¶ Reads the value of a given
variableof theobject.
-
void
write_variable(pair<ushort, Variant> node, Variant value)¶ Writes a value to the given global variable
node. Requires permissionvnx.opc_ua.permission_e.WRITE.
-
void
write_object_variable(pair<ushort, Variant> object, string variable, Variant value)¶ Writes a value to the given
variableof theobject. Requires permissionvnx.opc_ua.permission_e.WRITE.
-
void
browse_all()¶ Finds all available objects and variables on the server. Will be done automatically on every connect and re-connect.
vnx.opc_ua.Server¶
Module¶
The vnx.opc_ua.Server module provides a OPC-UA server to interface with the running process.
Depending on the configuration different modules and topics are offered on the OPC-UA interface.
Options¶
-
uint
port= 4840¶ The port number the server binds to.
-
set<string>
export_services¶ List of modues to offer on the OPC-UA interface as objects.
-
set<string>
export_topics¶ List of topics to offer on the OPC-UA interface as variables.
-
string
certificate_file¶ Optional path to a server certificate file (DER format).
-
string
private_key_file= ""¶ Optional path to a server private key file (DER format).
-
string application_uri = "urn:open62541.server.application"; Must match the URI in the certificate.
-
vector<string>
trust_list¶ Client certificate trust files (CRL format). This only has an effect if a server certificate is configured. If the list is empty, any certificate is accepted.
-
bool
allow_anonymous_access= true¶ Allow access without authentication.
-
bool
add_insecure_discovery= true¶ Allow discovery with security policy
NONEeven if not configured. This is necessary if you want a secure server (i.e. noNONEpolicy) that can still be discovered by a client. If security policyNONEis configured, this option has no effect.
-
vector<security_policy_e>
security_policies¶ A list of the security/encryption policies to provide. Most policies require a certificate and a private key. See vnx.opc_ua.security_policy_e
-
bool
use_authentication= false¶ If to require authentication from clients. (Not implemented yet)
-
string
default_access= "DEFAULT"¶ Default access level for anonymous clients, see User Management. Only if use_authentication = true, otherwise there are no restrictions, ie. full permissions to any user.
Topics¶
Topics are names under which data samples are published. Any number of subscribers can then receive the published data.
Topics are arranged in a tree and it is possible to subscribe to a whole sub-tree.
For example a subscription to input will receive samples from input.joy as well as input.velocity_cmd.
Topics do not have an assigned data type, but in most cases only a specific data type is published.
input¶
input.joy[pilot.JoyData]- Joystick input samples, published only when a Joystick is connected and controls are operated.
input.velocity_cmd[pilot.VelocityCmd]- Joystick velocity commands.
local_planner¶
local_planner.state[pilot.LocalPlannerState]- LocalPlanner state updates.
local_planner.target_pose[pilot.Pose2D]- LocalPlanner target pose updates.
localization¶
localization.map_tile[pilot.OccupancyMapData]- Localization map tile, ie. current section of the Grid Map.
localization.particles[pilot.PoseArray2D]- Localization particle swarm in
mapcoordinates. localization.status[pilot.LocalizationStatus]- Localization status updates.
mapping¶
mapping.grid_map[pilot.OccupancyMapData]- New Grid Map created by mapping.
mapping.pose_graph[pilot.RoadMapData]- Mapping pose graph.
movechain¶
movechain.status[pilot.MovechainStatus]- MovechainHandler status updates.
network¶
network.beacons[pilot.Beacon]- Beacons for fleet management.
platform¶
platform.battery_state[pilot.BatteryState]- Battery state updates.
platform.emergency_state[pilot.EmergencyState]- Emergency state updates.
platform.events[pilot.Event, pilot.Incident]- Generic events.
platform.incidents[pilot.Incident]- External incidents, to be handled by PilotServer.
platform.active_incidents[pilot.ActiveIncidents]- List of currently active incidents.
platform.info[pilot.PlatformInfo]- Static platform info.
platform.odometry[pilot.Odometry]- Odometry samples.
platform.pilot_state[pilot.PilotState]- Pilot state updats.
platform.system_state[pilot.SystemStatus]- System state update.
platform.velocity_cmd[pilot.VelocityCmd]- Custom velocity commands.
sensors¶
sensors.point_cloud.*[pilot.PointCloud2D, pilot.LaserPointCloud]- Laser point clouds in
odomcoordinates.
task_handler¶
task_handler.current_task[pilot.ExecutionState]- Current task being executed by TaskHandler module.
task_handler.current_event_task[pilot.ExecutionState]- Current event task being executed by TaskHandler module.
task_handler.execution_history[pilot.ExecutionHistory]- Execution history of TaskHandler module.
task_handler.event_history[pilot.ExecutionHistory]- Event execution history of TaskHandler module.
tf¶
tf.map.odom[pilot.Pose2D]- Localization updates.
tf.odom.base_link[pilot.Odometry]- Odometry samples.
tfd.map¶
tfd.map.local_planner.target_pose[pilot.Pose2D]- Same as local_planner.target_pose but in
mapcoordinates. tfd.map.navigation.local_path[pilot.Pose2D]- Same as navigation.local_path but in
mapcoordinates. tfd.map.sensors.point_cloud.*[pilot.Pose2D]- Same as sensors.point_cloud.* but in
mapcoordinates.
vnx¶
vnx.log_out[vnx.LogMsg]- Terminal log messags.
vnx.module_info[vnx.ModuleInfo]- Module info updates.
vnx.recorder_status[vnx.RecorderStatus]- Status information of the data recorder, when active.
Indices and tables
Indices and tables