Grafische Bedienoberfläche¶
Laden Sie die GUI hier herunter: 32bit, 64bit
Bemerkung
Die 64-Bit-Version ist leider nicht mehr mit der aktuellsten JRE verwendbar!
Einleitung¶
Das USBoard-USS4 wird zusammen mit einer grafischen Bedienoberfläche, der USBoard-USS4 configuration GUI, ausgeliefert. Mit diesem Programm lassen sich die Einstellungen des USBoard-USS4 komfortabel ändern sowie die aktuellen Messwerte auslesen und anzeigen.
Die USBoard-USS4-GUI benötigt einen PC mit:
- einer seriellen RS-232-Schnittstelle (COM-Port) und
- Java® Laufzeitumgebung mindestens in Version 1.5.
Die Verbindung zwischen COM-Port und USBoard-USS4 wird über ein spezielles Konfigurationskabel hergestellt, das von Neobotix bezogen oder mit Hilfe der Steckerbelegung selbst gefertigt werden kann. Das Konfigurationskabel stellt über einen gesonderten Anschluss auch die Stromversorgung sicher, welche durch eine Status-LED an der Längsseite des USBoard-USS4 signalisiert wird.
Die Bedienoberfläche kann ohne Installation durch einen Doppelklick auf die Datei start.bat gestartet werden. Achten Sie darauf, die für Ihr Betriebssystem passende Datei zu verwenden.
Die Bedienoberfläche kann ebenfalls unter Linux und Mac OS verwendet werden. Dazu muss jedoch gewährleistet sein, dass die RXTX-Bibliothek von der Java-Laufzeitumgebung gefunden werden kann und dass der Benutzer die nötigen Berechtigungen besitzt, um die serielle Schnittstelle zu benutzen. Unter Ubuntu Linux genügt es, das Paket librxtx-java zu installieren und den Benutzer der Gruppe dialout hinzuzufügen.
Erste Schritte¶
Verbindung aufbauen¶
Stellen Sie bitte sicher, dass vor dem Starten der Verbindung per USBoard-USS4-GUI folgende Bedingungen erfüllt sind
- Das USBoard-USS4 ist mit dem PC über eine serielle RS-232-Schnittstelle verbunden
- Es ist an eine geeignete Stromquelle angeschlossen (Status-LED leuchtet)
Wählen Sie nun im Programm die Schnittstelle (COM-Port) aus, über die sich das Programm verbinden soll. Klicken Sie anschließend auf die Schaltfläche „Connect“, um die Verbindung herzustellen.

Messwerte empfangen¶
Nach dem Verbindungsvorgang sollten Ihnen die aktuellen Mess- und Einstellungswerte angezeigt werden. Abhängig von den Parametern aktualisieren sich die Messwerte in einem bestimmten Intervall automatisch oder nur auf Anfrage per Klick auf die Request Schaltflächen. Unterschreitet der Messwert eines Sensors die Warndistanz wird der Messwert gelb und beim Unterschreiten der Alarmdistanz rot dargestellt. Gleichzeitig wird die entsprechende gelbe bzw. rote LED samt Relais auf dem USBoard-USS4 aktiviert.
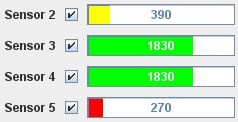
Die Messwerte der Analogeingänge (Spannungsbereich 0 V – 5 V) werden prozentual unter denen der Sensoren angezeigt.
Verbindung beenden¶
Um die Verbindung der Anwendung zum USBoard-USS4 zu trennen, klicken Sie auf „Disconnect“.
Das USBoard-USS4 konfigurieren¶
Kommunikationseinstellungen¶
In der linken Spalte können die Parameter für die Kommunikation mit dem USBoard-USS4 festgelegt werden. Im Feld CAN können die Basis-ID und die Übertragungsrate, die bei der Kommunikation via CAN-Bus verwendet werden sollen, eingestellt werden.
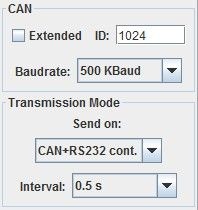
Das generelle Übertragungsverhalten kann im Feld Transmission Mode eingestellt werden. Die möglichen Verhaltensweisen sind in Tabelle 4 aufgelistet. Die unter Interval wählbare Zykluszeit ist nur für kontinuierliche Übertragungsmodi relevant.
| Übertragunsmodus | Verhalten |
|---|---|
| Request | Sendet nur auf Anfrage |
| CAN cont. | Sendet kontinuierlich über CAN |
| RS232 cont. | Sendet kontinuierlich über RS-232 |
| RS232 + CAN cont. | Sendet kontinuierlich über RS-232 und CAN |
Sensoren konfigurieren¶
Rechts können verschiedene Parameter für die Sensoren festgelegt werden: In den Kontrollkästchen neben den Bezeichnungen der Sensoren kann man diese jeweils aktivieren oder deaktivieren (Häkchen gesetzt bzw. nicht gesetzt). Deaktivierte Sensoren senden keinen Echo-Impuls und keine Messwerte. Rechts neben der Anzeige des aktuellen Entfernungsmesswertes können die Warn- und Alarmbereiche festgelegt werden. Die ID des USBoard-USS4 und die Analogeingänge sind nicht konfigurierbar.
Warnung
Das USBoard-USS4 ist trotz Warn- und Alarmbereich kein Sicherheitssystem und kann ausschließlich unterstützende, nicht sichere Daten liefern. Verwenden Sie das USBoard-USS4 niemals zur Absicherung von Gefahrenstellen.
Konfigurationen auf das Board überspielen¶
Die geänderten Konfigurationsparameter müssen manuell auf das USBoard-USS4 übertragen werden, um in Funktion zu treten. Die USBoard-USS4-GUI bietet dafür zwei Optionen an:

- Write to Board schreibt die Parameter in den flüchtigen Speicher des USBoard-USS4, d.h. nach dem nächsten Hardware-Neustart werden wieder die vorherigen Parameter genutzt.
- Write to EEPROM schreibt die Parameter in den nichtflüchtigen EEPROM-Speicher des USBoard-USS4, d.h. die Parameter bleiben auch nach einem Hardware-Neustart erhalten und werden genutzt, bis sie überschrieben werden.
Um den jeweils aktuellen Parametersatz aus dem Speicher des USBoard-USS4 neu auszulesen, drücken Sie „Read from Board“. Änderungen in der Eingabemaske gehen dabei jedoch verloren.
Konfigurationen speichern und laden¶
Mit Save to File und Load from File lassen sich die aktuellen Konfigurationsdaten in einer Datei speichern bzw. aus dieser laden. Geben Sie dazu einfach in dem nach Knopfdruck erscheinendem Dialog den gewünschten Dateinamen ein bzw. wählen Sie die entsprechende Datei aus und bestätigen mit „Ok“.
Logging¶
Die USBoard-USS4-GUI schreibt Log-Dateien auf die Festplatte, um die Einrichtung des Systems und die Fehlerbehebung zu unterstützen. Die Anzahl der zu schreibenden Meldungen kann über den Level Wert zwischen Severe (nur kritische Probleme) und Finest (alle Meldungen) gewählt werden. Die Log-Dateien befinden sich im Unterordner log des Verzeichnisses, in dem auch die GUI selbst liegt.
Eine Echtzeitausgabe des aktuellen Logs kann über die Schaltfläche „Show / Hide“ angezeigt werden.