

Produktbeschreibung¶
Bei dem Neobotix ArgoDriveModule handelt es sich um eine zweiachsige Antriebseinheit für mobile Roboterfahrzeuge und ähnliche Anwendungen, die auf dem ArgoDrive von ebm-papst basiert. Die beiden Servoregler sind beim ArgoDriveModule in einem kompakten Gehäuse an einer der Seiten des ArgoDrive-Gehäuses integriert, wahlweise links oder rechts. Dadurch werden Bauraum und Verkabelungsaufwand massiv reduziert und die Module sind sehr einfach zu montieren.
Komponenten¶
Das ArgoDriveModule besteht aus den folgenden Komponenten:
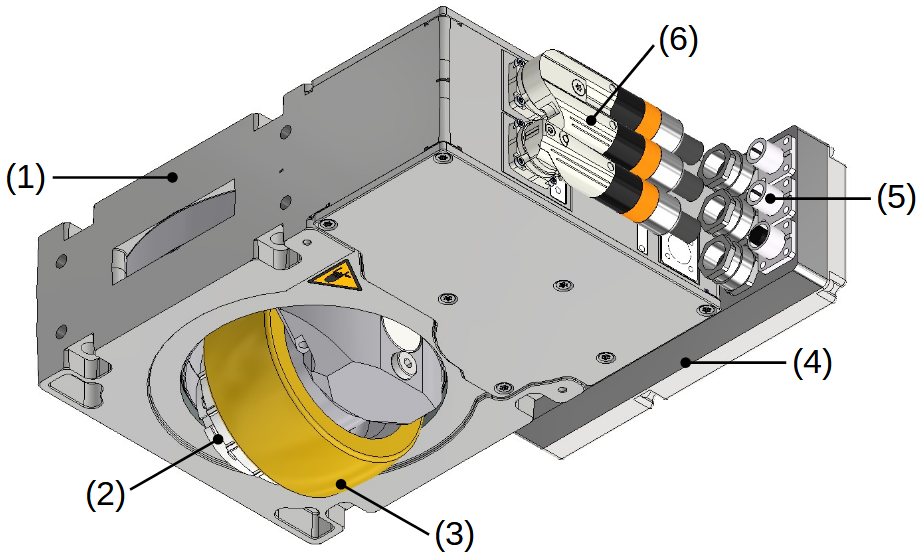
- ArgoDrive-Gehäuse
- Feststellbremse
- Antriebsrad
- Baugruppe mit Servoreglern
- Anschlüsse des ArgoDriveModules
- Anschlüsse des ArgoDrives
Ansteuerung¶
Das ArgoDriveModule lässt sich am einfachsten unter PlatformPilot von Neobotix verwenden. Diese industrielle Steuerungssoftware wurde speziell für autonome mobile Roboter (AMR) mit omnidirektionalen Kinematiken entwickelt und unterstützt auch das ArgoDriveModule. Sie bietet verschiedene Bewegungsmodi und kann über eine Vielzahl an Parametern detailliert an individuelle Anwendungen angepasst werden.
Eine weitere sehr verbreitete Möglichkeit ist das quelloffene Framework ROS 2. Das Robot Operating System wird von einer riesigen internationalen Community genutzt und ständig weiterentwickelt, so dass es sehr viele fortgeschrittene und außergewöhnliche Module und Lösungen bereitstellt. Durch seine Flexibilität ist ROS 2 vor allem in der Forschung und Entwicklung sehr beliebt. Für die Anbindung an ROS 2 bietet Neobotix einen passenden Treiber an.
Mögliche Kinematiken¶
Ein ArgoDriveModule mit zwei Bockrollen¶
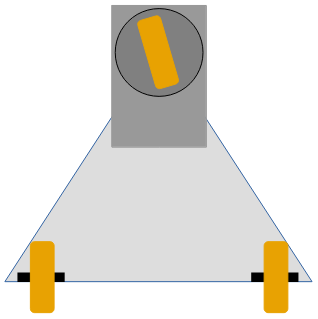
Diese Konfiguration ist kostengünstig und einfach anzusteuern. Die Möglichkeit, dass die Räder bei bestimmten Bewegungen blockieren besteht zwar, ist aber ausgesprochen gering.
Mit dieser Konfiguration sind keine omnidirektionale Bewegungen möglich, da das Fahrzeug immer dem ArgoDriveModule folgt.
Drei ArgoDriveModules¶
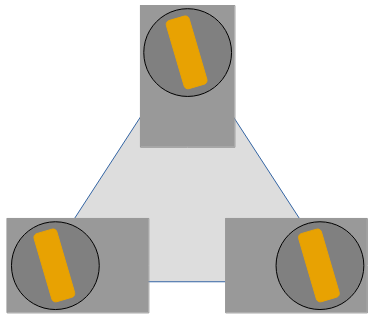
Diese Konfiguration bietet eine hohe Stabilität für kleinere Roboter, ist statisch bestimmt und ermöglicht voll omnidirektionale Bewegungen.
Alle drei Antriebe müssen jederzeit korrekt ausgerichtet sein, um Schlupf und Blockieren zu vermeiden. Außerdem muss der Winkel zwischen den Antriebsrädern immer dem aktuellen Drehpunkt der gesamten Plattform angepasst werden.
Vier ArgoDriveModules¶
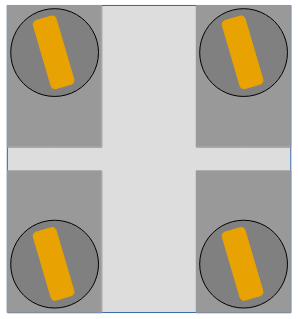
Diese Konfiguration ist die bei Servicerobotern verbreitetste, weil sie auch großen und schweren Robotern eine hohe Stabilität bietet. Ihre statische Überbestimmtheit ist in den meisten Fällen kein Problem, da alle Räder jederzeit aktiv angetrieben werden.
Alle vier Antriebe müssen immer korrekt ausgerichtet sein, um Schlupf und Blockieren zu vermeiden. Außerdem muss der Winkel zwischen den Antriebsrädern immer dem aktuellen Drehpunkt der gesamten Plattform angepasst werden.