

Das LC-Display¶
Einige Neobotix-Roboter sind mit einem LC-Display ausgestattet, das aktuelle Statusinformationen anzeigt.
Hauptansicht¶
Informationsmeldungen¶
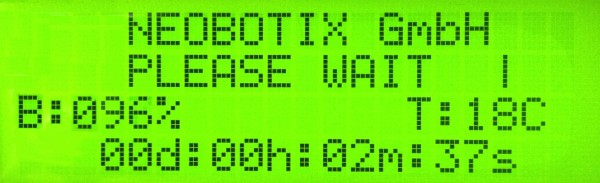
In der ersten Zeile des LCDs kann die Robotersteuerung bei Bedarf Text anzeigen. Sendet die Steuerung keine Informationsmeldungen, so wird „NEOBOTIX GmbH“ angezeigt.
Information¶
In der zweiten Zeile des LCDs wird der aktuelle Zustand des Roboters angezeigt.
- PLEASE WAIT
- Die Robotersteuerung hat sich noch nicht mit dem RelayBoard verbunden.
- READY
- Die Robotersteuerung ist aktiv und der Roboter ist betriebsbereit.
- EMERGENCY STOP
- Eine der Not-Halt-Tasten wurde betätigt.
- TURN KEY →
- Bestätigen Sie das Zurücksetzen des Not-Halts, indem Sie den Schlüsselschalter nach rechts drehen, kurz halten (ca. 1 Sekunde) und wieder in Ausgangsposition drehen.
- SCANNER STOP
- Es wurde ein Hindernis im Laserscanner-Schutzfeld erkannt. Sobald das Hindernis entfernt wurde, wird das Sicherheitssystem wieder freigegeben. Bei einem Roboter mit FlexiSoft-Sicherheitssteuerung werden alle Not-Halt-Zustände auf diese Weise angezeigt.
- CHARGING
- Der Roboter lädt gerade seine Akkus auf. Die Meldung wird angezeigt, bis der Ladevorgang abgeschlossen oder abgebrochen wurde.
- SHUTDOWN IN XXs
- Der Roboter wird sich in wenigen Sekunden abschalten.
- BATTERY VOLTAGE LOW
- Die Batteriespannung ist zu niedrig und der Roboter wird sich in Kürze abschalten, um eine Tiefentladung der Akkus zu verhindern. Nähere Informationen finden Sie weiter unten.
- MOTOR ERROR
- Einer oder mehrere der Motoren senden eine Fehlermeldung. Dieser Zustand wird automatisch zurückgesetzt, sobald keine Fehlermeldungen mehr vorliegen.
- SAFETY RELAY FAIL
- Eines der Sicherheitsrelais ist verklebt. Bitte wenden Sie sich an Neobotix.
- POWER RELAY FAIL
- Die Lastrelais sind verklebt. Bitte wenden Sie sich an Neobotix.
- EMSTOP BUTTON FAIL
- Eine der Not-Halt-Tasten schaltet nicht mehr zuverlässig. Bitte wenden Sie sich an Neobotix.
- CHARGE RELAY FAIL
- Das Laderelais ist verklebt. Bitte wenden Sie sich an Neobotix. Es ist möglich, dass die Ladekontakte am Gehäuse unter Spannung stehen!
- CHECKSUM ERROR
- Es gab einen Fehler bei der Datenübertragung zwischen RelayBoard und Robotersteuerung. Sollte dieser Fehler bestehen bleiben bzw. öfter auftreten, überprüfen Sie die Datenverbindung und die Logausgaben der Steuerung.
Ladezustand¶
- B:096%
- Zeigt den aktuellen Ladestand der Batterie an. Die auftretenden Spannungsbereiche sind wie folgt.
| Nennspannung | Schutzabschaltung | Arbeitsbereich | Ladevorgang |
|---|---|---|---|
| 24 V | ≤ 22 V | 23 V .. 25 V | 25 V .. 29 V |
| 48v | ≤ 44 V | 46 V .. 52 V | 52 V .. 59 V |
Temperaturanzeige¶
- T:20C
- Hier wird die direkt am RelayBoard gemessene Temperatur (in °C) angezeigt.
Laufzeit¶
- 00d:00h:02m:37s
- In der letzten Zeile wird die bisherige Laufzeit des Roboters, in Tagen, Stunden, Minuten und Sekunden, seit dem letzten Einschalten angezeigt.
Die Info-Ansicht¶
Diese Ansicht ist nicht bei allen Robotertypen verfügbar.
Versionsangabe¶
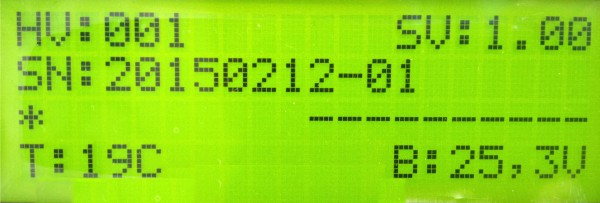
Die erste Zeile der Info-Ansicht zeigt die Hardwareversion (HV) und die Softwareversion (SV) des RelayBoards. Für Updates der Softwareversion wenden Sie sich an Neobotix.
Seriennummer¶
In der zweiten Zeile wird die Seriennummer (SN) des RelayBoards angezeigt.
Informationsfelder¶
Die dritte Zeile gibt Aufschluss über die aktuelle Konfiguration und den Status der Motoren und externen Hardware.
Ein Stern auf der ersten Position bedeutet, dass das RelayBoard noch keine gültige Konfiguration empfangen hat. Sobald die Robotersteuerung eine Konfiguration übertragen hat, wird dies durch ein „C“ signalisiert.
Auf der rechten Seite werden im konfiguriertem Zustand die Verfügbarkeiten aller CAN-Bus-Teilnehmer angezeigt. Für jeden aktiven Motor wird ein „M“ angezeigt, für das IOBoard ein „I“ und für das USBoard ein „U“. Nicht vorhandene Geräte werden durch einen Querstrich markiert. Sollte ein Motor oder ein optionales Board konfiguriert sein aber nicht ordnungsgemäß mit dem RelayBoard kommunizieren, wird für dieses Gerät ein „F“ angezeigt.