

LC Display¶
Some Neobotix robots are equipped with an LC display to display current status information.
Main View¶
Messages¶
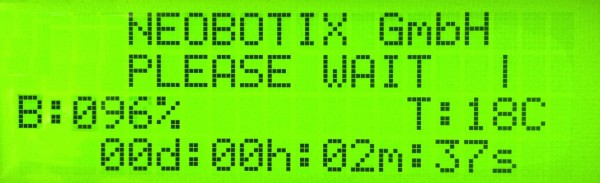
The first line can be used to print messages sent from ROS, PlatformPilot or any other high level control software. The default message is “NEOBOTIX GmbH”.
Status¶
The second line indicates the robot’s current status.
- PLEASE WAIT
- The control software is not yet connected to the robot’s main control board.
- READY
- The control software is active and the robot is fully operational.
- EMERGENCY STOP
- One of the emergency stop buttons has been pressed.
- TURN KEY →
- Reset the safety system by turning the key switch clockwise for about one second.
- SCANNER STOP
- An obstacle has been detected within the laser scanner’s safety field. As soon as the obstacle has been removed, the safety system will be reset automatically. If a Flexi Soft safety controller is installed, all stops are indicated with this message.
- CHARGING
- The robot is currently charging its batteries.
- SHUTDOWN IN XXs
- The robot will turn itself off in a few seconds.
- BATTERY VOLTAGE LOW
- The battery voltage is critically low and the robot will soon shut down to prevent a deep discharge. Further information can be found in the next section.
- MOTOR ERROR
- At least one motor is reporting an error. This state is quit automatically as soon as all motors are operational again.
- SAFETY RELAY FAIL
- One of the safety relays is damaged. Please contact Neobotix.
- POWER RELAY FAIL
- The power relays are damaged. Please contact Neobotix.
- EMSTOP BUTTON FAIL
- One of the emergency stop buttons does not operate properly. Please contact Neobotix.
- CHARGE RELAY FAIL
- The charging relay is damaged. Please contact Neobotix. The charging contacts might still be connected to the batteries!
- CHECKSUM ERROR
- The protocol versions of the control software and the RelayBoard do not match. Please check the wiring and the log output of your software.
Battery Charge Level¶
- B:096%
- The current charge level of the batteries. Due to the batteries characteristics the actual battery voltage may be higher than the platform’s rated main voltage.
| Nominal voltage | Shut-down | Working range | Charging |
|---|---|---|---|
| 24 V | ≤ 22 V | 23 V .. 25 V | 25 V .. 29 V |
| 48v | ≤ 44 V | 46 V .. 52 V | 52 V .. 59 V |
Temperature¶
- T:20C
- This is the temperature (in °C) inside the platform, measured at the RelayBoard.
Uptime¶
- 00d:00h:02m:37s
- The bottom line shows the uptime since startup in days, hours, minutes and seconds.
The Info View¶
This view mode is not available in all robot types.
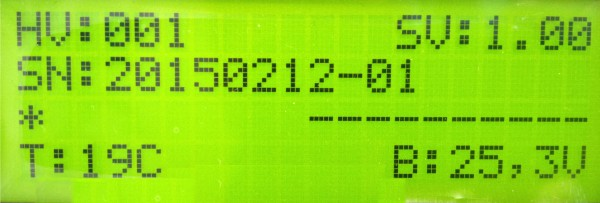
Version Information¶
The first line of this view shows the hardware version (HV) and the software version (SV) of the RelayBoard. For software updates please contact Neobotix.
Serial Number¶
The second line shows the serial number (SN) of the RelayBoard.
Status Information¶
The third line indicates the current configuration of the software and the state of the hardware components.
The asterisk (*) indicates that the RelayBoard did not yet receive a valid configuration from the control software. After configuration it will be replaced by a C.
The right part shows the state of all CAN bus devices. Motors are indicated by an M, the IOBoard by an I and the USBoard by a U. Devices that are not installed are marked by a dash (-) and devices that failed to connect are marked by an F.