

Mechanische Eigenschaften¶
Abmessungen¶
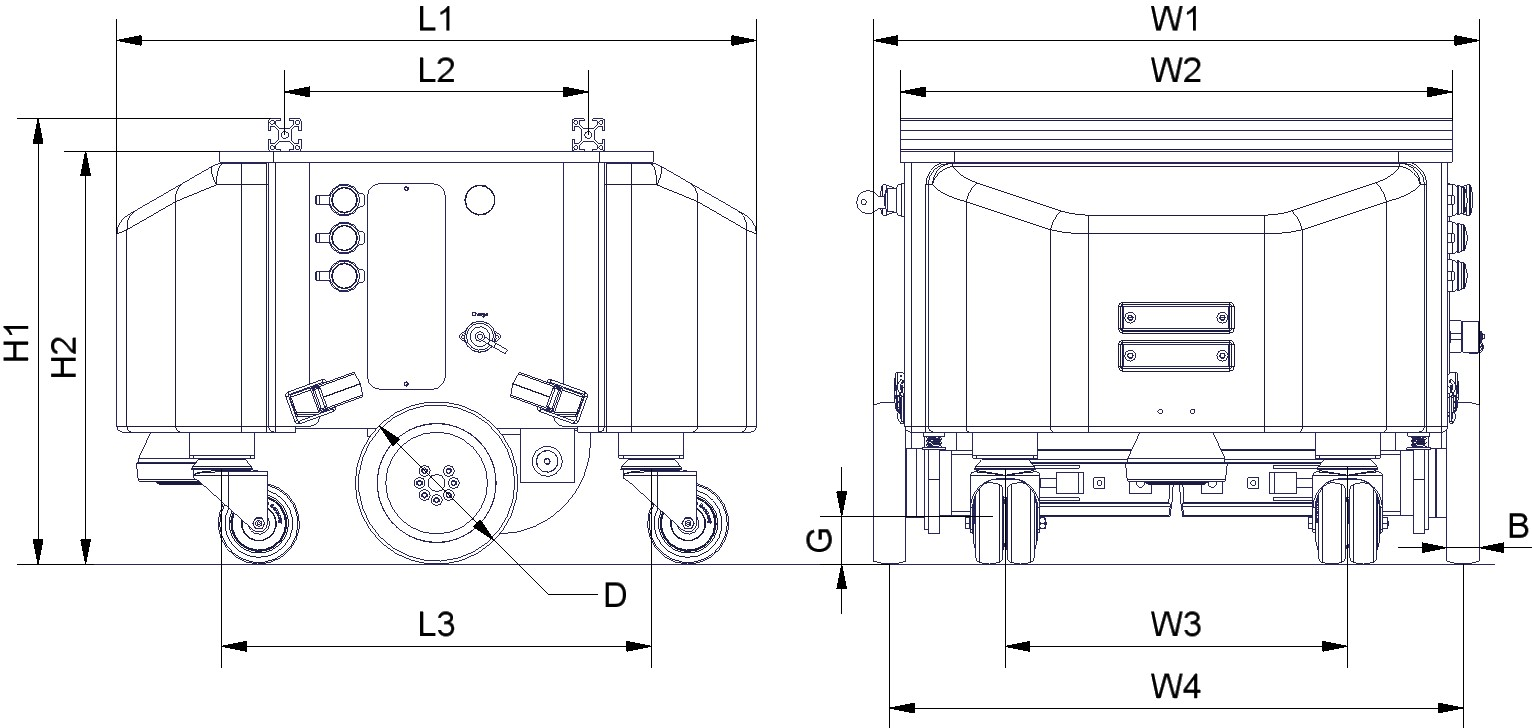
Abmessungen des MP-400
| Beschreibung | Symbol | Wert (mm) |
|---|---|---|
| Durchmesser der Antriebsräder | D | 150 |
| Breite der Antriebsräder | B | 30 |
| Bodenfreiheit | G | 44 |
| Höhe der Anbauprofile | H1 | 411 |
| Höhe der Deckplatte | H2 | 381 |
| Länge der Plattform (über alles) | L1 | 590 |
| Nutabstand der Anbauprofile | L2 | 280 |
| Radstand der Lenkrollen | L3 | 396 |
| Breite der Plattform (über alles) | W1 | 559 |
| Breite der Ladefläche und Anbauprofile | W2 | 509 |
| Spurweite der Lenkrollen | W3 | 316 |
| Spurweite der Antriebsräder | W4 | 529 |
Absolute Grenzwerte¶
Warnung
Ein Überschreiten dieser Grenzwerte kann zu Fehlfunktionen führen oder den Roboter beschädigen!
| Beschreibung | Einheiten | Wert |
|---|---|---|
| Traglast (auf Ladefläche, Standardvariante) | kg | 100 |
| Traglast (auf Ladefläche, Schwerlastvariante) | kg | 150 |
| Höchstgeschwindigkeit | m/s | 1.5 |
| Maximale Schwelle zum Überfahren (≤ 0.25m/s) | mm | 10 |
| Maximale Schwelle zum Überfahren (Höchstgeschwindigkeit) | mm | 5 |
| Maximalbeschleunigung | m/s² | 2.4 |
| Lagertemperatur | °C | -20 .. +60 |
| Betriebstemperatur (Umgebungstemperatur) | °C | +0 .. +25 |
Sensorpositionen¶
Alle Abstände sind in Millimetern angegeben, gemessen relativ zum Koordinatensystem der Plattform. Alle Winkel sind in Grad, gemessen mathematisch positiv gegen die Fahrtrichtung.
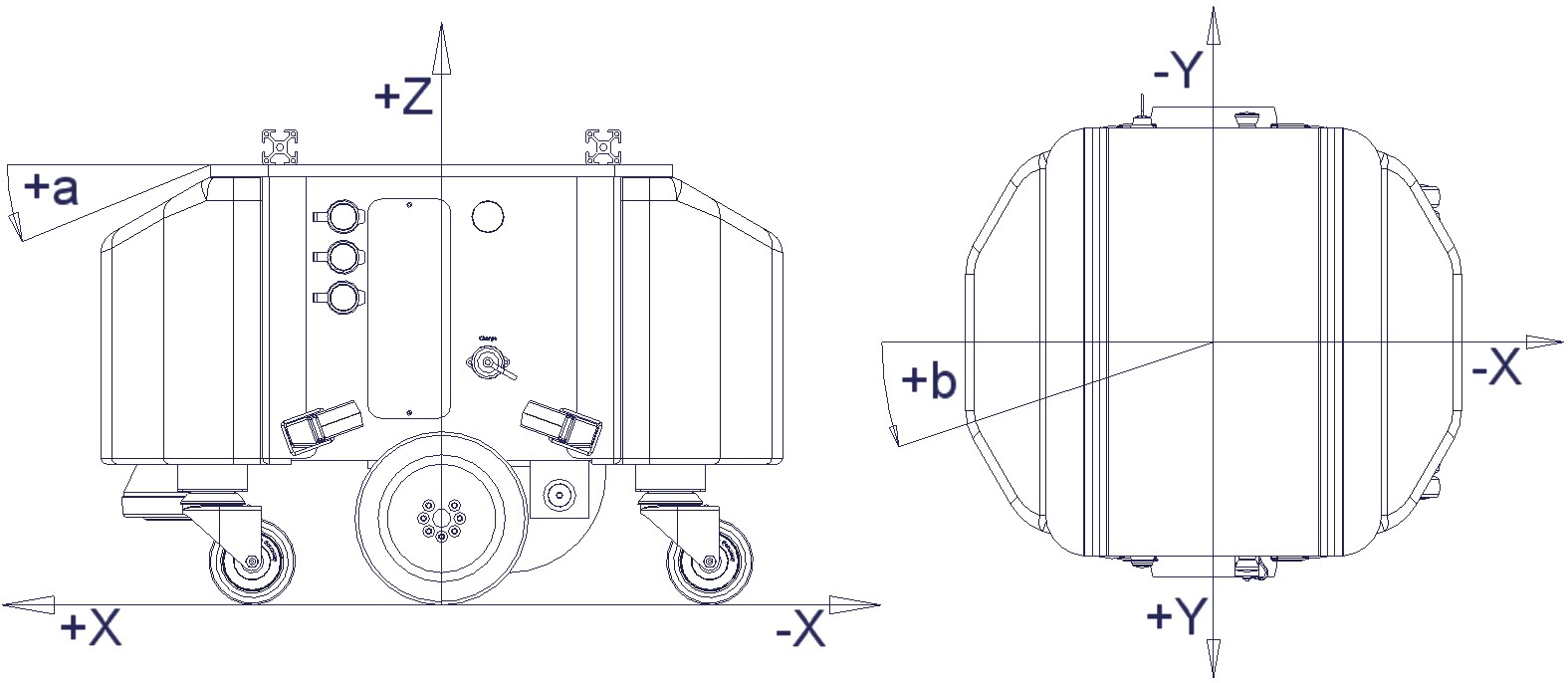
Koordinatensystem des MP-400
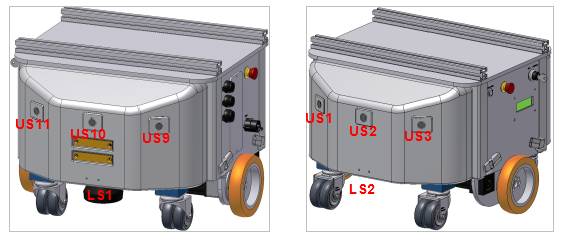
Position der Sensoren am MP-400
| Sensor | Symbol | X-pos. | Y-pos. | Z-pos. | a-angle | b-angle |
|---|---|---|---|---|---|---|
| Laserscanner vorne | LS1 | 230 | 0 | 110 | 0 | 0 |
| Laserscanner hinten | LS2 | -354 | 0 | 110 | 0 | 180 |
| Ultraschallsensor 1 | US1 | -266 | 157 | 280 | 0 | 150 |
| Ultraschallsensor 2 | US2 | -298 | 0 | 280 | 0 | 180 |
| Ultraschallsensor 3 | US3 | -266 | -157 | 280 | 0 | 210 |
| Ultraschallsensor 9 | US9 | 266 | 157 | 280 | 0 | 30 |
| Ultraschallsensor 10 | US10 | 298 | 0 | 280 | 0 | 0 |
| Ultraschallsensor 11 | US11 | 266 | -157 | 280 | 0 | 330 |
Elektrische Kennwerte und sonstige Daten¶
Eigenschaften der internen Komponenten¶
Alle Daten entstammen den entsprechenden Datenblättern.
| Beschreibung | Einheiten | Wert |
|---|---|---|
| Motorleistung | W | 300 |
| Nenndrehzahl | rpm | 3000 |
| Maximale Drehzahl | rpm | 5000 |
| Erreichbare Drehzahl (bei Batteriespannung) | rpm | 1800 |
| Nennmoment der Motoren | Nm | 0.95 |
| Maximales Moment der Motoren | Nm | 2.85 |
| Bremsmoment (statisch) | Nm | 1.47 |
| Encoderauflösung | Inkremente / Umdr. | 10000 |
| Getriebeuntersetzung | 1 | 8:1 |
| Nennspannung der Batterien | V | 24 |
| Maximale ungeregelte Spannung | V | 29 |
| Batteriekapazität | Ah | 50 |
Erfassungsbereiche der Sensoren¶
Alle Daten entstammen den entsprechenden Datenblättern.
| Sensor | Auflösung | Min. Abst | Max. Abst | Hor. Winkel | Vert. Winkel |
|---|---|---|---|---|---|
| Laserscanner | 0.5 ° | 0 m | 30 m | ±135 ° | 0 ° |
| Ultraschallsensoren | ~±0.01 m | 0.25 m | 1.5 m | ±60 ° | ±30 ° |
Sonstige Eigenschaften¶
| Beschreibung | Einheiten | Wert |
|---|---|---|
| Gewicht | kg | 70 |
| Voraussichtliche Arbeitszeit | a | 10 |
Steckverbinder¶
Siehe Steckverbinder.