

Bedienelemente¶
Die folgenden Abbildungen zeigen die Seiten des MP-400 und die wichtigsten Bedienelemente.
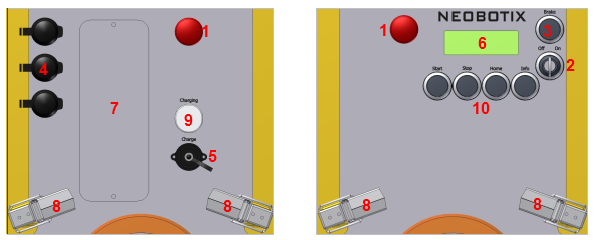
Bedienelemente
| 1 | Not-Halt-Tasten |
| 2 | Schlüsselschalter |
| 3 | Bremsen-Lösen-Taste |
| 4 | USB / Ethernet Buchse |
| 5 | Ladebuchse |
| 6 | LC-Display |
| 7 | Computerzugang (optional) |
| 8 | Schnellverschlüsse der Hülle |
| 9 | LED „Ladevorgang“ |
| 10 | Tastenfeld |
Not-Halt-Tasten¶
Durch Drücken einer der beiden Tasten wird der Roboter sofort sicher stillgesetzt. Dazu werden die Antriebe von der Stromversorgung getrennt und die Sicherheitsbremsen aktiviert. Zum Rücksetzen des Sicherheitssystems müssen alle betätigten Not-Halt-Tasten durch Drehen im Uhrzeigersinn entriegelt und der Schlüsselschalter für ca. eine Sekunde nach rechts gedreht werden.
Schlüsselschalter¶
Sehen Sie dazu Schlüsselschalter.
Bremsen-Löse-Taste¶
Mit dieser Taste können die Sicherheitsbremsen beider Fahrantriebe auch bei abgeschaltetem Roboter manuell gelüftet werden, um den Roboter zu verschieben.
Tipp
Falls die Steuerungssoftware gestartet wurde, wird die Plattform von den Antrieben in Position gehalten, auch wenn die Bremsen manuell gelöst wurden. In diesem Fall muss mindestens einer der Not-Aus-Taster gedrückt werden, ehe der Roboter von Hand verschoben werden kann.
Ladebuchse und Anzeige-LED¶
Hier kann das Stromkabel zum Laden der Batterie angeschlossen werden. Während des Ladevorgangs leuchtet die LED über der Ladebuchse. Der Roboter kann auch mit voll geladenen Batterien beliebig lange an das Stromnetz angeschlossen bleiben.
LC-Display¶
Hier werden die wichtigsten Informationen zum aktuellen Zustand des Roboters dargestellt. Nähere Informationen finden Sie im Kapitel Das LC-Display.
Zugang zum Bordrechner¶
Diese Wartungsklappe bietet Zugang zu den Anschlüssen des Bordrechners. Hinter den schwarzen Kappen befinden sich eine USB-Buchse und ein Ethernet-Anschluss. Die USB-Buchse kann zum Beispiel für den kurzfristigen Anschluss eines kabelgebundenen Joysticks verwendet werden, falls sie nicht bereits den Empfänger des Funk-Joysticks enthält.
Tastenfeld¶
Das Tastenfeld kann für einfache Eingaben und vordefinierte Befehle verwendet werden. Standardmäßig ist es ohne Funktion und muss von der Anwendungssteuerung interpretiert werden.
Durch Drücken der Info-Taste werden technische Details des Roboters im LC-Display angezeigt. Weitere Informationen finden Sie unter Das LC-Display.