

Mechanical Properties¶
Dimensions¶
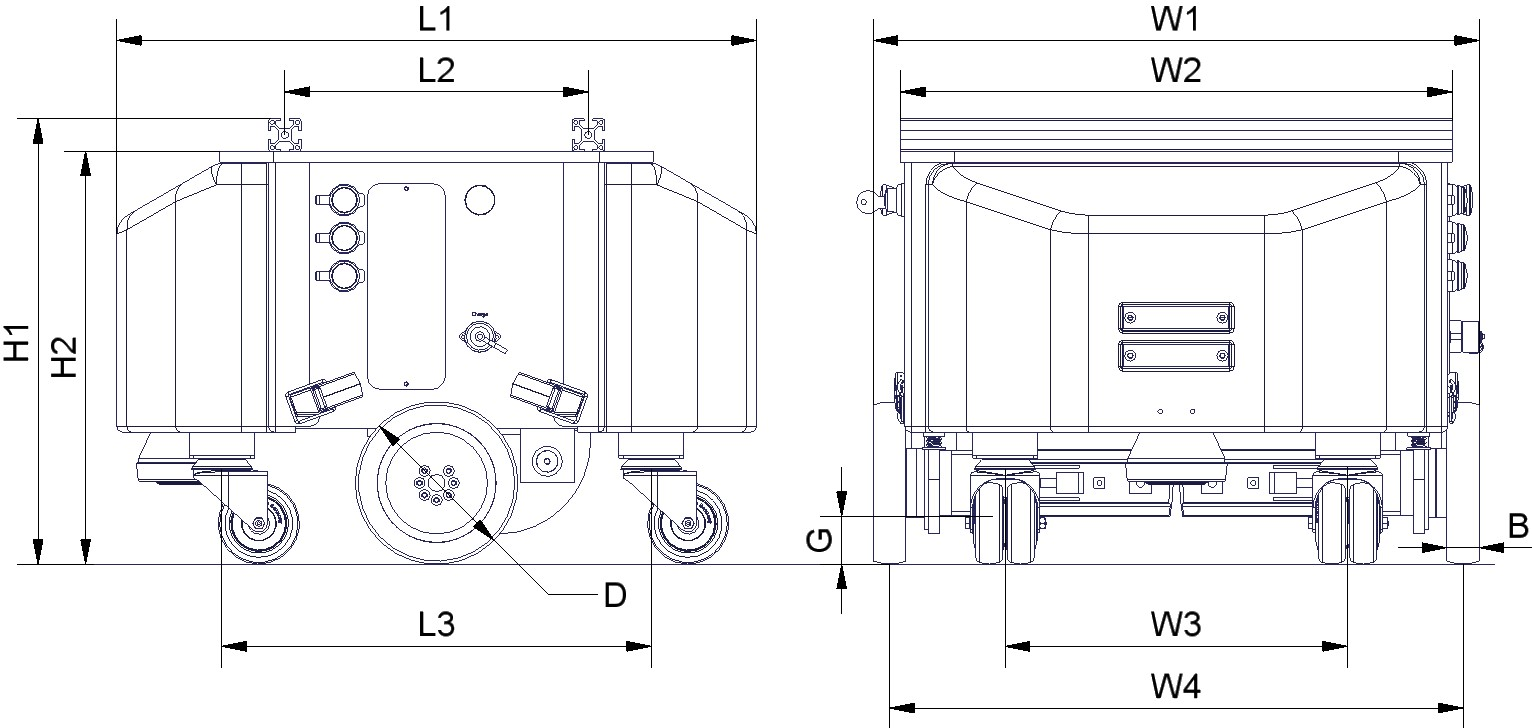
Dimensions of the MP-400
| Description | Symbol | Value (mm) |
|---|---|---|
| Diameter of drive wheels | D | 150 |
| Width of drive wheels | B | 30 |
| Ground clearance | G | 44 |
| Height of mounting profiles | H1 | 411 |
| Height of top plate | H2 | 381 |
| Overall length of platform | L1 | 590 |
| Centre distance of mounting profiles | L2 | 280 |
| Wheel base of the castor wheels | L3 | 396 |
| Maximum width | W1 | 559 |
| Width of mounting profiles and top plate | W2 | 509 |
| Track width of the castor wheels | W3 | 316 |
| Track width of the drive wheels | W4 | 529 |
Absolute Maximum Ratings¶
Warning
Exceeding these ratings might cause malfunctions or damage the robot!
| Description | Units | Value |
|---|---|---|
| Payload (on top plate, standard version) | kg | 100 |
| Payload (on top plate, high payload version) | kg | 150 |
| Maximum speed | m/s | 1.5 |
| Maximum bumpiness to pass over (≤ 0.25m/s) | mm | 10 |
| Maximum bumpiness to pass over (full speed) | mm | 5 |
| Maximum acceleration | m/s² | 2.4 |
| Storage temperature | °C | -20 .. +60 |
| Operating temperature (environmental temperature) | °C | +0 .. +25 |
Positions of Sensors¶
All distances are in millimetres, measured relative to the platform’s coordinate system. All angles are in degrees, measured counter-clockwise from the driving direction.
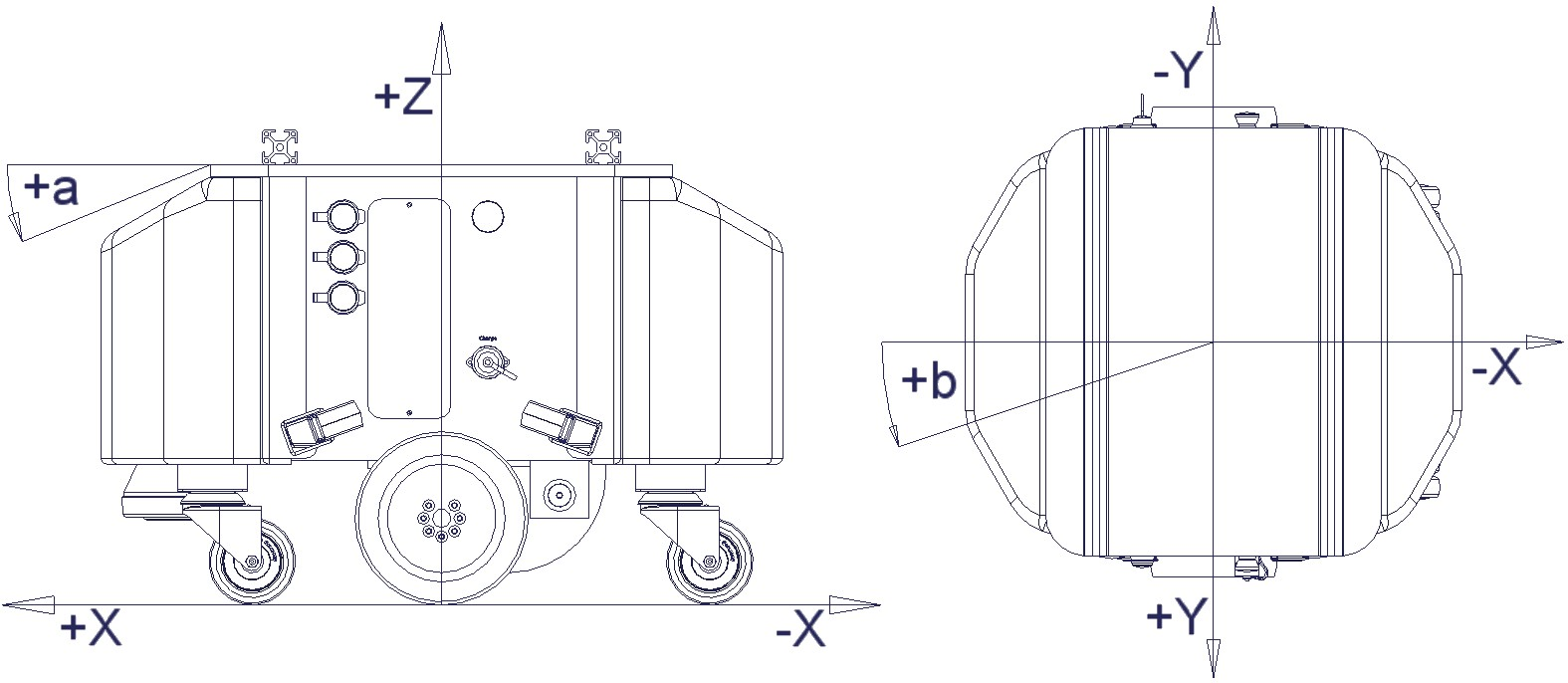
Coordinate system of MP-400
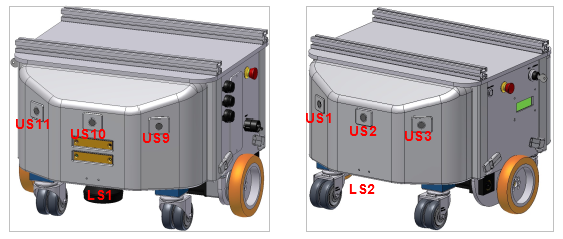
Sensor positions at the MP-400
| Sensor | Symbol | X-pos. | Y-pos. | Z-pos. | a-angle | b-angle |
|---|---|---|---|---|---|---|
| Front laser scanner | LS1 | 230 | 0 | 110 | 0 | 0 |
| Rear laser scanner | LS2 | -354 | 0 | 110 | 0 | 180 |
| Ultrasonic sensor 1 | US1 | -266 | 157 | 280 | 0 | 150 |
| Ultrasonic sensor 2 | US2 | -298 | 0 | 280 | 0 | 180 |
| Ultrasonic sensor 3 | US3 | -266 | -157 | 280 | 0 | 210 |
| Ultrasonic sensor 9 | US9 | 266 | 157 | 280 | 0 | 30 |
| Ultrasonic sensor 10 | US10 | 298 | 0 | 280 | 0 | 0 |
| Ultrasonic sensor 11 | US11 | 266 | -157 | 280 | 0 | 330 |
Electrical Properties and Miscellaneous Data¶
Properties of Internal Components¶
All data are taken from the respective data sheets.
| Description | Units | Value |
|---|---|---|
| Motor power | W | 300 |
| Rated motor speed | rpm | 3000 |
| Maximum motor speed | rpm | 5000 |
| Possible motor speed (at battery voltage) | rpm | 1800 |
| Rated motor torque | Nm | 0.95 |
| Maximum motor torque | Nm | 2.85 |
| Brake torque (static) | Nm | 1.47 |
| Encoder resolution | Increments/Revolution | 10000 |
| Gear ratio | 1 | 8:1 |
| Rated battery voltage | V | 24 |
| Maximum unregulated voltage | V | 29 |
| Battery capacity | Ah | 50 |
Metering Capacities of Sensors¶
All data are taken from the respective datasheets.
| Sensor | Resolution | Min.range | Max. range | Hor. angle | Vert. angle |
|---|---|---|---|---|---|
| Laser scanner | 0.5 ° | 0 m | 30 m | ±135 ° | 0 ° |
| Ultrasonic sensors | ~±0.01 m | 0.25 m | 1.5 m | ±60 ° | ±30 ° |
Other Properties¶
| Description | Units | Value |
|---|---|---|
| Weight | kg | 70 |
| Expected working time | a | 10 |
Connectors¶
See Connectors.