Starting with ROS 2 on Classic Gazebo¶
The simulation package neo_simulation2 targetting Classic Gazebo, comes along with all the new ROS 2 features.
Like it’s predecessor, neo_simulation2 package is fully equipped with all the Neobotix MP series robots that is available in the market. By combining the novelty of ROS 2 with the state-of-the-art Neobotix platforms, users can learn and develop various reliable and robust applications that cater to their needs in both research and industry.
Attention
Classic Gazebo is available only in Ubuntu 22.04. The latest ROS 2 Distro support we offer for Gazebo Classic is Humble.
Launch¶
Launching the simulation is fairly easy
ros2 launch neo_simulation2 simulation.launch.py my_robot:=mpo_700 world:=neo_workshop
Launch Arguments
Attention
Only available for Humble distro.
Arguments (pass arguments as '<name>:=<value>'):
'my_robot':
Robot Types: "mpo_700", "mpo_500", "mp_400", "mp_500"
(default: 'mpo_700')
'world':
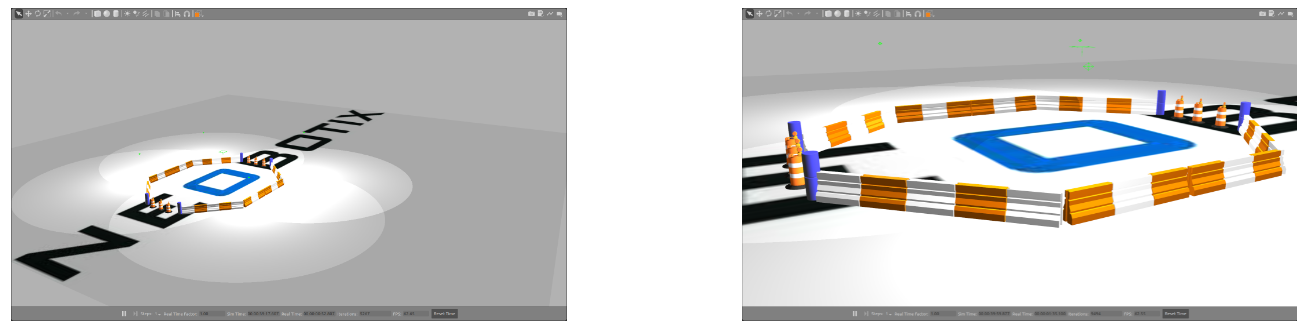
Available worlds: "neo_track1", "neo_workshop"
(default: 'neo_workshop')
'arm_type':
Arm Types:
Elite Arms: ec66
Universal Robotics: ur5, ur10, ur5e, ur10e
(default: '')
Attention
arm_type support is available only for “mpo_700” and “mpo_500”. Please contact us directly if there is a requirements with “mp_500” and “mp_400”.
Attention
There are no plans to support ROX robots in Classic Gazebo. Please contact us directly in case of any requirements.
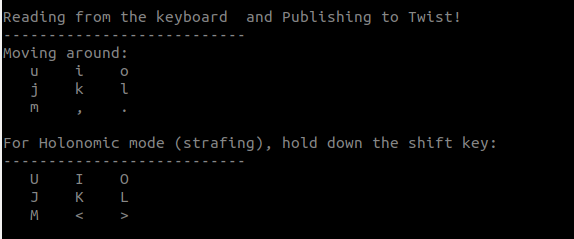
Robot can be moved using the keyboard as shown in the Image below: