

Bedienelemente¶
Die Abbildung zeigt die Hintenansicht des MPO-500 und die wichtigsten Bedienelemente.
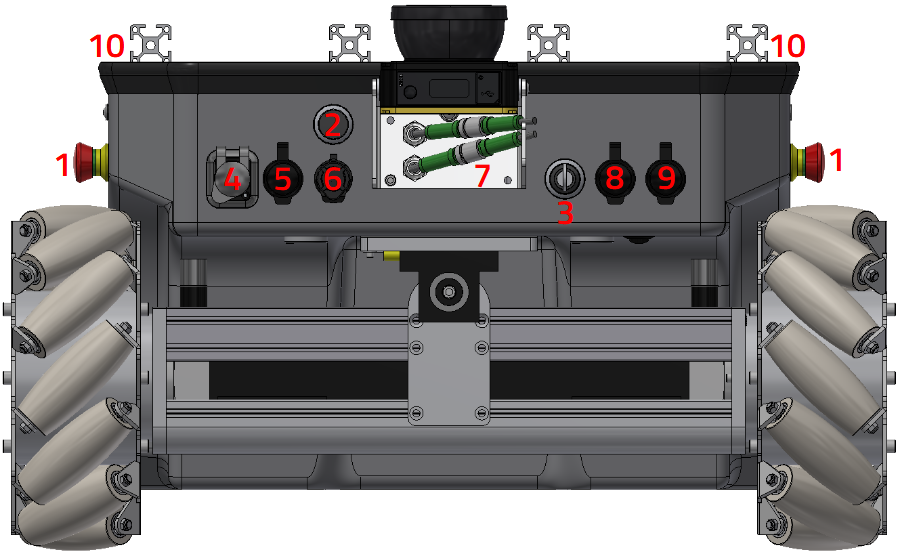
Bedienelemente des MPO-500
1 Not-Halt-Tasten 2 Bremsen-Lösen-Taste 3 Schlüsselschalter 4 HDMI-Buchse 5 Joystick-Empfänger 6 Ladebuchse 7 Scanner-Anschluss 8 Ethernet-Buchse 9 USB-Buchse 10 LED-Anzeige
Not-Halt-Tasten¶
Durch Drücken von einer der beiden Tasten wird der Roboter sofort sicher stillgesetzt. Dazu werden die Antriebe von der Stromversorgung getrennt und die Sicherheitsbremsen aktiviert. Zum Rücksetzen des Sicherheitssystems müssen alle betätigten Not-Halt-Tasten durch Drehen im Uhrzeigersinn entriegelt und der Schlüsselschalter für ca. eine Sekunde nach rechts auf Position II gedreht werden.
Schlüsselschalter¶
Sehen Sie dazu Schlüsselschalter.
Bremsen-Löse-Taste¶
Mit dieser Taste können die Sicherheitsbremsen alle Fahrantriebe auch bei abgeschaltetem Roboter manuell gelüftet werden, um den Roboter zu verschieben.
Ladebuchse¶
Hier kann das Batterieladegerät angeschlossen werden. Nähere Informationen finden Sie unter Ladevorgang.
LED-Anzeige¶
Der MPO-500 besitzt LED-Statusanzeigen, die denen im ROX entsprechen. Weitere Informationen dazu finden Sie unter LED-Beleuchtung.
Zugang zum Bordrechner¶
Eine HDMI-Buchse, eine USB-Buchse und ein Ethernet-Anschluss können genutzt werden, um direkt auf dem Rechner zu arbeiten und ihn für einen neuen Einsatz vorzubereiten.