neo_mpo_700-2¶
|
|
Summary¶
The neo_mpo_700-2 package provides configuration and launch files for the MPO-700 omnidirectional mobile platform. It manages the kinematics and bundles all necessary ROS 2 files to run the Neobotix MPO-700 for both real-world applications and simulations, including support for real and mock arms and grippers when configured as the MMO-700 mobile manipulator variant.
Launch¶
To bring up the robot drivers and hardware components, execute the following command in a terminal:
ros2 launch neo_mpo_700-2 bringup.launch.py
Launch Arguments¶
To view a detailed description of all available launch arguments, run:
ros2 launch neo_mpo_700-2 bringup.launch.py --show-arguments
Note
As of July 2023, namespacing support is partially available for MPO-700.
Arguments (pass arguments as '<name>:=<value>'):
'robot_namespace':
Top-level namespace
(default: '')
'imu_enable':
Enable IMU - Options: True/False
(default: 'False')
'd435_enable':
Enable Realsense - Options: True/False
(default: 'False')
'scanner_type':
Type of laser scanner to use. Valid choices are: ['', 'sick_s300', 'sick_microscan3']
(default: 'sick_s300')
'disable_scanners':
Disable Scanner - Options: True/False
(default: 'False')
'use_docking_adapter':
Enable docking adapter - Options: True/False
(default: 'False')
'arm_type':
Arm Types
. Valid choices are: ['', 'ur5', 'ur10', 'ur5e', 'ur10e', 'ec66']
(default: '')
'use_ur_dc':
Set this argument to True if you have an UR arm with DC variant
(default: 'False')
'gripper_type':
Enables gripper and it's controllers. Valid choices are: ['', '2f_140', '2f_85', 'epick']
(default: '')
'use_mock_arm':
Mock arm and gripper (if available)
(default: 'False')
'initial_controller_arm':
Initial controller for the arm
. Valid choices are: ['', 'joint_trajectory_controller', 'scaled_joint_trajectory_controller']
(default: 'scaled_joint_trajectory_controller')
'robot_ip':
IP address of the robot arm.
(default: '192.168.1.102')
'controllers_file':
YAML file with the arm controllers configuration.
(default: '/home/pradheep/jazzy_ws/install/neo_mpo_700-2/share/neo_mpo_700-2/configs/ur/ur_controllers.yaml')
Nodes¶
The following table lists the nodes launched by the bringup.launch.py file, along with links to their detailed documentation.
| Node Name | See Package |
|---|---|
relayboard_v2_node |
neo_relayboard_v2-2 |
neo_omnidrive_node |
neo_kinematics_omnidrive2 |
neo_omnidrive_socketcan |
neo_kinematics_omnidrive2 |
lidar_1 / lidar_2 |
neo_sick_s300-2 |
lidar_1_filter / lidar_2_filter |
neo_sick_s300-2 |
neo_teleop_node |
neo_teleop2 |
Note
For a list of services and topics, please refer to the documentation for the nodes mentioned above.
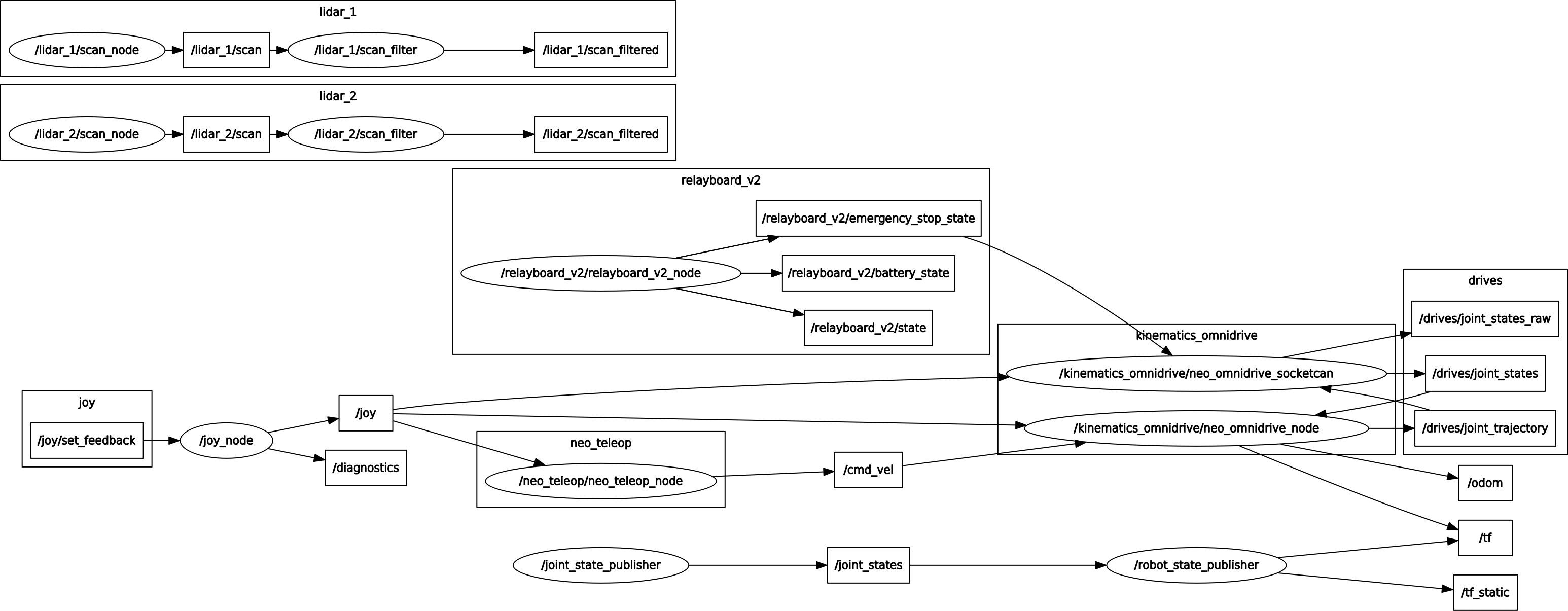
RQT-Graph¶